
 Загруженные дороги итальянского города Модены стали испытательным полигоном при разработке сенсорной технологии, которая позволяет автомобилям «видеть» сквозь здания и другие транспортные средства, чтобы избежать столкновения. Еще недавно система hands-free, а до этого усилитель рулевого управления устанавливались в автомобилях в качестве дополнительной опции. Но есть одна важная функция, внедрение которой все еще запаздывает: автоматическая система обеспечения безопасности движения и предотвращения столкновений, работающая в режиме реального времени. Реализация европейского проекта CLASS по инициативе Барселонского суперкомпьютерного центра (BSC) началась в 2018 году и завершилась в июне текущего года. Муниципалитет Модены, компания Atos, автопроизводитель Maserati и команда IBM Research из г. Хайфа (Израиль) в сотрудничестве с Университетом Модены и Реджо-Эмилии (UNIMORE) превратили загруженные дороги Модены в лабораторию под открытым небом.
Загруженные дороги итальянского города Модены стали испытательным полигоном при разработке сенсорной технологии, которая позволяет автомобилям «видеть» сквозь здания и другие транспортные средства, чтобы избежать столкновения. Еще недавно система hands-free, а до этого усилитель рулевого управления устанавливались в автомобилях в качестве дополнительной опции. Но есть одна важная функция, внедрение которой все еще запаздывает: автоматическая система обеспечения безопасности движения и предотвращения столкновений, работающая в режиме реального времени. Реализация европейского проекта CLASS по инициативе Барселонского суперкомпьютерного центра (BSC) началась в 2018 году и завершилась в июне текущего года. Муниципалитет Модены, компания Atos, автопроизводитель Maserati и команда IBM Research из г. Хайфа (Израиль) в сотрудничестве с Университетом Модены и Реджо-Эмилии (UNIMORE) превратили загруженные дороги Модены в лабораторию под открытым небом.
Мы доказали: город и автомобили можно оснастить датчиками, которые позволят транспортным средствам «знать», что находится за объектами поблизости, а также «заглядывать» за углы. Это решение поможет водителям избегать столкновений и будет способствовать улучшению дорожной обстановки.

CLASS: прототип системы перекрестной проверки слепых зон в масштабах города
Заблаговременно предупредить автомобиль или водителя о приближающемся транспортном средстве или внезапном появлении ребенка из-за припаркованной машины не способен ни один из существующих датчиков.
Между тем современные автомобили, как правило, могут подключаться к интернету через сотовую сеть. На многих улицах в большинстве крупнейших городов разных стран постоянно осуществляется мониторинг. Для этого используются принадлежащие муниципальным властям камеры и датчики. Если бы данные с этих камер и датчиков передавались движущимся по прилегающим дорогам автомобилям, они смогли бы «чувствовать» ту или иную приближающуюся, но пока не находящуюся в зоне их видимости опасность.
С другой стороны, автомобили с датчиками и возможностями подключения, движущиеся по улицам в разных направлениях, стали бы источником информации на участках, которые не просматриваются муниципальными устройствами.
В рамках данного проекта мы разработали экспериментальный прототип системы, которая сочетает периферийные вычисления с облачными инфраструктурами, объединяя муниципальные устройства и транспортные средства как источники информации для проведения перекрестной сверки в режиме реального времени.
Датчики на каждом шагу
Сначала мы установили на улицах высокотехнологичные датчики и подключили их к основному ЦОД города через оптоволоконную сеть. Этот центр стал выполнять роль облака для проекта. Затем мы оснастили автомобили Maserati — седан Quattroporte и кроссовер Levante — множеством датчиков, в том числе HD-камерами, лидарами и GPS, подключенными к инфраструктуре города через выделенный сегмент LTE-сети.
Мы также установили на эти автомобили графические ускорители Nvidia Jetson и ноутбуки, служившие макетом консоли бортовой системы Advanced Driver Assistance System (ADAS), чтобы водители могли получать уведомления CLASS от городского ЦОД.
В ходе испытаний в рамках проекта CLASS автомобили Quattroporte и Levante передвигались по улицам Модены, отправляя данные с датчиков в городской центр. Предупреждения о потенциальных опасностях выводились на экраны ноутбуков, служивших макетом системы ADAS.
Для профессиональных водителей-испытателей Maserati все эти протоколы и компоненты стали единым каналом уведомлений, отображающихся на консоли ADAS. Уведомления заблаговременно предупреждали водителей о возможных столкновениях и препятствиях, предоставляя достаточно времени, чтобы среагировать.
Залогом эффективной работы прототипа CLASS стала интеграция в реальном времени данных от камер и датчиков, установленных на рядом проезжающих транспортных средствах, с автомобилем и облаком. Обработка этих данных включала обнаружение объектов, отмеченных видеокамерами, лидарами и радарами, анализ потенциальных траекторий движения этих объектов и прогнозы ДТП.
За прогнозирование траекторий и столкновений отвечал движок Lithops, который в рамках проекта адаптировали для быстрой обработки периферийных и облачных данных с минимальными затратами и на инфраструктуре serverless.
Планирование рабочего процесса с учетом временных ограничений и необходимости передачи данных от периферийных устройств в облако осуществлялось с помощью инструментов COMPS и dataClay от BSC. Использовав высокоскоростную глубокую нейронную сеть (YOLO), команда университета UNIMORE осуществила преобразование входных видеоданных в аналитический поток объектов, что позволило поднять производительность мобильного графического ускорителя выше характеристик по умолчанию.
Для оценки производительности прототипа CLASS мы разработали и применили первый универсальный инструмент сопоставительного анализа для Apache OpenWhisk под названием owperf, предназначенный специально для обработки событий. В рамках проекта CLASS было задано новое направление развития вычислений serverless с использованием одного из фреймворков EXPRESS, который изначально нацелен на снижение эксплуатационных расходов.
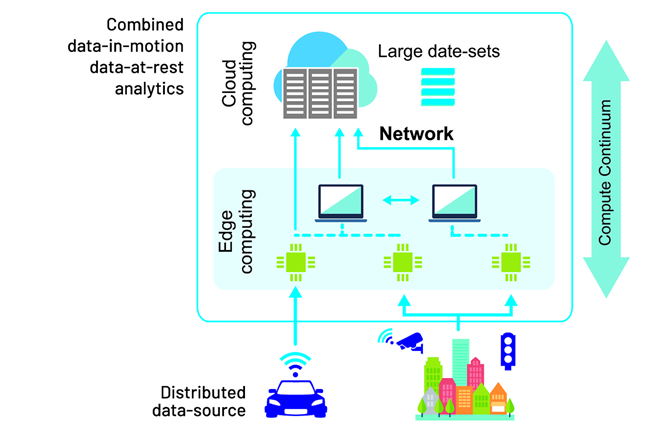 Рабочий процесс «облако — автомобиль» европейского проекта CLASS.
Рабочий процесс «облако — автомобиль» европейского проекта CLASS.
От улиц Модены до вашего города
Проект CLASS завершился летом 2021 года, но мы только начинаем детально анализировать результаты. Он продемонстрировал возможность построения единой системы дорожного движения, а также пользу комплексных ИТ для водителей и для администрации муниципалитетов, открывая дорогу к созданию интеллектуальных городов будущего.
Оригинальный материал на английском читайте здесь.
Автор: @VictoriaSeredina
Источник: https://habr.com/
Понравилась статья? Тогда поддержите нас, поделитесь с друзьями и заглядывайте по рекламным ссылкам!