
 В современных условиях космическая деятельность является одним из основных факторов, определяющих уровень развития и влияния России, её статус государства высоких технологий. Космическая деятельность относится к государственным приоритетам, определяющим инновационные пути развития страны. Как отмечено в «Основах политики Российской Федерации в области космической деятельности…», первоочередной задачей использования космических средств является создание информационных полей, обеспечивающих непрерывную связь; радио- и телевещание; навигацию; оперативное получение данных наблюдения из космоса земной поверхности и атмосферы; обеспечение потребителей услугами связи, координатно- временными данными, информацией наблюдения, контроля и управления; повышение эффективности, достижение глобальности и непрерывности стратегического информационного обеспечения. Выполнение такой масштабной задачи предполагает, в частности, решение взаимосвязанных оптимизационных и расчётных задач, а именно:
В современных условиях космическая деятельность является одним из основных факторов, определяющих уровень развития и влияния России, её статус государства высоких технологий. Космическая деятельность относится к государственным приоритетам, определяющим инновационные пути развития страны. Как отмечено в «Основах политики Российской Федерации в области космической деятельности…», первоочередной задачей использования космических средств является создание информационных полей, обеспечивающих непрерывную связь; радио- и телевещание; навигацию; оперативное получение данных наблюдения из космоса земной поверхности и атмосферы; обеспечение потребителей услугами связи, координатно- временными данными, информацией наблюдения, контроля и управления; повышение эффективности, достижение глобальности и непрерывности стратегического информационного обеспечения. Выполнение такой масштабной задачи предполагает, в частности, решение взаимосвязанных оптимизационных и расчётных задач, а именно:
- задачи обоснования тактико-технико-экономических требований к перспективным комплексам наземной космической инфраструктуры, космическим аппаратам и средствам выведения;
- задачи логистического обеспечения с целью совершенствования системы поставок на космодромы ракетно-космической техники, оборудования и иных грузов;
- задачи оптимизации экономических ресурсов наземной космической инфраструктуры, необходимых для реализации программы развертывания орбитальной системы космических аппаратов [1].

Создание ракетных комплексов связано с решением целого ряда сложных научных и инженерных задач. В области наземного оборудования, среди прочих, к таким задачам относится проблема доставки собранных в заводских условиях ракет- носителей и других грузов ракетно-космического назначения на технические и стартовые позиции по дорогам различных категорий, в том числе и грунтовым. Транспортировка продукции ракетно-космического назначения является неотъемлемой частью технологического процесса подготовки к пуску и пуска ракет космического назначения. Четкое и качественное проведение работ по подготовке к пуску ракет космического назначения определяющим образом влияет на успешное выполнение запуска. Процесс перемещения грузов ракетно-космического назначения требует поиска рационального способа транспортного обеспечения, выбора транспортных средств, оптимального направления перевозки, форм и методов организации транспортного процесса, анализа альтернативных решений.
Общий алгоритм организации транспортировки продукции ракетно- космического назначения включает следующие процедуры:
- выбор вида транспортировки;
- выбор вида (или нескольких видов) транспорта;
- выбор основных и вспомогательных логистических посредников в транспортировке.
Особенностью обеспечения полетов космических аппаратов с помощью ракет космического назначения является то, что на стартовый комплекс с завода- изготовителя ракета космического назначения доставляется отдельными блоками (ступенями), поскольку целиком собранную ракету космического назначения доставить
к месту старта невозможно ни одним из существующих видов транспорта. К основным факторам, влияющим на выбор вида транспорта при транспортировке продукции ракетно-космического назначения, относятся:
- наличие путей сообщения или стоимость их строительства;
- габариты груза;
- необходимая грузоподъемность транспортных средств;
- особые условия транспортировки груза (температурно-влажностный режим, уровень допустимых перегрузок, уровень напряжения корпуса при креплении к транспортному средству, защита от атмосферных осадков и ветра, безопасность режимов движения);
- требования к грузоподъемности и проходимости транспортных средств;
- допустимые удельные нагрузки на дорожное полотно;
- расстояние транспортировки;
- стоимость транспортировки;
- сроки транспортировки [2].
Постановка задачи
Рассматриваемая в настоящей работе задача относится к задачам о принятии оперативных решений при возникновении непредвиденной ситуации на маршруте доставки и необходимости изменения опорного плана. Разработка и исследование транспортно-логистической системы с помощью имитационной модели позволяет оценить компетентность специалиста, при принятии решений без вмешательства в работу реальной системы, растянуть или сжать время функционирования логистической системы, понять сложное взаимодействие элементов внутри системы, оценить степень влияния факторов и выявить «узкие места». Разрабатывается ситуационная модель принятия оперативных решений при возникновении непредвиденной ситуации на маршруте, корректировке опорного плана и выборе нового маршрута доставки. Ситуационный подход в принятии решений для транспортно-логистической системы предполагает не только оценку возникшей непредвиденной ситуации на маршруте, но и определение управляющего решения. Такое представление получило название нечёткой ситуационной сети (НСС) [3-7]. Ситуационный шаг управления представляется формулой:
SNET : S] Uk ⃗ S1j (1)
где SNET – выполнение опорного плана SNET ; S] – текущая ситуация (узел Wi); S1] – новая ситуация (узел Wj корректировка опорного плана); uk ⃗ – выбор маршрута в «непредвиденной ситуации» – выбор модели доставки) (рис. 1).
Для «непредвиденной ситуации» требуется не просто идентифицировать ситуацию и соответствующее ей множество управляющих решений, но и определить рациональные пути достижения целей планирования и оперативного управления выбора маршрута доставки, для чего необходимо определить возможные последствия управляющих решений на несколько шагов вперёд. Задачи оперативного управления выбора маршрута доставки требуют привлечения дополнительных методов, среди которых хорошо себя зарекомендовали методы, основанные на представлении совокупности типовых состояний системы в виде узлов графа, переходы которого соответствуют управляющим решениям.
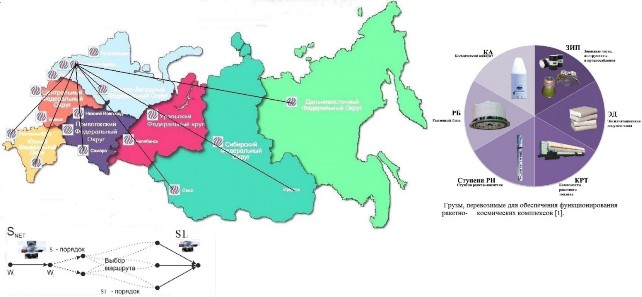
Рис.1. Ситуационный шаг управления (условный вариант)
Ситуационная сеть SNET представлена в виде ориентированного графа SNET (W¸A) , где W – множество узлов – состояний, а A – множество дуг-переходов между состояниями.
SNET (W¸A)( ;W={wi│iNw};A{ai.jli = 1 … . . Nw ; j = 1 … . . Nw } (2) Метод вывода по нечёткой ситуационной сети [3,4] основывается на определении связного подграфа, содержащего некоторое начальное состояние сети w’, относительно которого ведётся поиск.
S´ = (W´¸ A´); W´ ∈ W¸ w´ ∈ W´; A´{ai.jlwi. wj ∈ W´} (3) Направленным нечетким графом S´ (W´¸ A´) называется пара множеств, в которой W´ ∈ W¸ w´ ∈ W´ – множество вершин графа; A´{ai.jlwi. wj ∈ W´} – нечеткое множество направленных ребер графа, вершина wi является началом, wj – концом ребра wi,wj ; µA 〈wi ¸wj〉 – значение функции принадлежности µA для ребра wi,wj .
Вид подграфа SNET ‘ определяется типом конкретной ситуационной сети:
- для сетей, в дугах переходов которых отсутствует случайная составляющая,
- SNET ‘ обычно принимает вид цепи (выполнение опорного плана);
- для сетей, учитывающих случайные факторы при переходах, SNET ищется в виде дерева, соответствующего поливариантному сценарию управления (определяются варианты моделей).
Создание компьютерной модели логистической системы включает такие взаимосвязанные этапы, как содержательная постановка задачи; разработка концептуальной модели; разработка и программная реализация имитационной модели; оценка адекватности модели и точности результатов моделирования; планирование экспериментов; принятие решений. Эти показатели не имеют четко очерченных оптимальных границ. Показатели дают возможность количественно оценить подготовку специалиста, определить тип поведения специалиста, и соответственно разработать как коллективную, так и индивидуальную методику подготовки специалистов.
Методика определяется следующей последовательностью действий. При возникновении «непредвиденной ситуации» в узле Wj – дальнейший маршрут определяется следующим образом [6, 7]. Определяется множество альтернативных (возможных) маршрутов доставки μ(j)=SNET = {SNET 1, SNET 2, …..SNET i,……SNET n}. Каждый маршрут характеризуется параметрами (критериями), – Y = {y1, y2, …yj,…ym} (например, пропускная способность, расстояние, время доставки). Выбор модели доставки грузов мij отражает уровень соответствия i-го маршрута доставки требованиям по j-му параметру (мijE [0; 1]; i = 1, т; j = 1, п).
- Модель максиминной свертки (ММС). Наилучшим считается маршрут при минимальных недостатках по всем параметрам.
- Модель абсолютного решения (МАР). Задается минимально допустимое значение µij min для каждого параметра Y. Выбирается маршрут с параметрами не хуже заданных.
- Модель основного параметра (МОП). Решение производится по шагам. На каждом шаге выбирается основной параметр, и поиск наилучшего решения ведется только по нему.
- Модель компромиссного параметра (МКП). Логист выбирает параметры по уровню их важности и определяет влияние каждого параметра на выбор маршрута.
- Модель эталонного сравнения (МЭС). Имеется оптимальное решение на основе компромиссной модели, при этом учитываются ограничения на значения параметров. Определяется эталонный вариант маршрута доставки груза Х0. Параметры этого варианта принимаются как минимально допустимые значения параметров µij min. Каждый вариант маршрута множества Х сравнивается с эталонным Х0.
Разрабатывается имитационная модель принятия оперативных решений при возникновении непредвиденной ситуации на маршруте, корректировке опорного плана и выборе нового маршрута доставки (рис. 2) в среде редактора AnyLogic, анализ модели происходит в среде исполнения [8, 9].
Обработка событий исполняющего модуля AnyLogic. Моделирование в AnyLogic представляет собой выполнение последовательности событийных и временных шагов [8]. Чтобы связать модель с базой данных MS Access «Деловая карта», нужно вначале создать объект database и excel File – элементы модели AnyLogic, который будет соответствовать реальному опорному плану и обеспечивать взаимодействие с ним. Программируются события исполняющего модуля AnyLogic – это события event (маршруты опорного плана), которые могут быть выполнены в данный момент. События исполняющего модуля AnyLogic хранятся в очереди сообщений.
Временной шаг. Если текущих событий нет, то AnyLogic выполнит временной шаг до ближайшего события (или событий) в очереди, т.е. увеличит значение модельного времени. Во время выполнения временного шага может произойти событие, вызванное тем, что выполнилось какое-то заданное условие. Дискретная часть исполняющего модуля AnyLogic не знает о том, когда выполнится условие срабатывания перехода: это зависит от системы уравнений выбора модели доставки грузов (µij отражает уровень соответствия i-го маршрута доставки требованиям по j-му параметру (µijϵ [0;1]; i=1, m; j=1, n)), решаемой непрерывной частью исполняющего модуля.

Рис. 2. Обмен данными между элементами имитационной модели
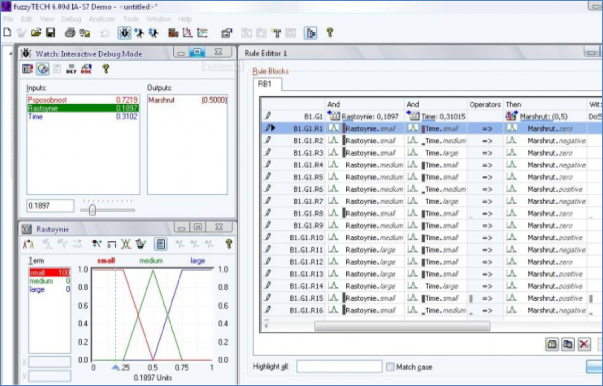
Рис. 3. Интерактивный режим программы FuzzyTech
В интерактивном режиме программы fuzzyTECH [10] можно не только видеть значение конечного результата µ(j), но и следить за промежуточными операциями. Данная возможность необходима при внесении новых переменных и правил в процедуру определения альтернативного маршрута. Демонстрация промежуточных результатов контролирует перенос правил нечёткого вывода в программу. Как только это произойдет, значение времени будет увеличено до времени, выданного решателем уравнений, и будет выполнен событийный шаг.
Событийный шаг. На один момент времени могут быть запланированы сразу несколько событий event1 (выбор дальнейшего маршрута). Программа выберет одно из этих событий и выполнит его. Это будет повторяться до тех пор, пока не будут выполнены все текущие события.
Выводы
Разработана имитационная модель принятия оперативных решений специалистом при возникновении непредвиденной ситуации, корректировке ситуации и выборе нового продолжения работы логистической системы, обучении необходимым квалификационным навыкам и принятия решений на основе имитационного моделирования транспортно-логистических систем, моделируемых в среде AnyLogic и Business Map. Алгоритм состоит из взаимосвязанных этапов, таких как содержательная постановка задачи, разработка концептуальной модели; разработка и программная реализация имитационной модели, оценка адекватности модели и точности результатов моделирования, планирование экспериментов; принятие решений, что позволяет проверить и оценить квалификацию специалистов по времени решения логистической системы SNET: S] – S1j.
Литература
- В.И. Горбулин, Р.А. Евдокимов, А.С. Фадеев. Обоснование стратегии развёртывания и восполнения орбитальных систем космических аппаратов на основе комплексной оптимизации управления организационно-технической системой/ Вопросы электромеханики Т. 128. 2012, с.35-40.
- Е.А. Белоусова. Оптимизация управления транспортными потоками продукции ракетно-космического назначения/ Известия СПбГЭТУ «ЛЭТИ» № 2/2014, с.66-70.
- Фараонов А.В. Ситуационное моделирование в задачах управления транспортными потоками ракетно-космической техники на основе нечеткой ситуационной сети / Труды Шестой международной научно-практической конференции. «Имитационное и комплексное моделирование морской техники и морских транспортных систем» (ИКМ МТМТС-2021) // ISBN 978-5-00189-175-8 // М. Издательство «Перо», 2021, с.139-144.
- Фараонов А.В. Оптимизация решений в задачах управления транспортными потоками ракетно-космической техники // Международный научно-практический симпозиум «Безопасность космических полетов», 2019, СПб, 24–27 сентября.
- Фараонов А.В. Ситуационное моделирование как метод подготовки специалистов транспортной логистики и эффективности принятия решения / Труды пятой международной научно-практической конференции «Имитационное и комплексное моделирование морской техники и морских транспортных систем» – «ИКМ МТМТС-2019» // ISBN 978-5-902241-28-7 // АО «Центр технологии судостроения и судоремонта», Санкт-Петербург, 2019, с. 182-186.
- Фараонов А.В. Ситуационное моделирование как метод подготовки специалистов в области принятия эффективных управленческих решений / Труды девятой всероссийской научно-практической конференции по имитационному моделированию и его применению в науке и промышленности «Имитационное моделирование. Теория и практика» (ИММОД-2019)//ISBN 978-5-91450-172-0. С. 249-252.
- Фараонов А.В. Разработка ситуационной модели задачи маршрутизации при необходимости изменения опорного плана на основе нечёткой ситуационной сети. //
- В кн.: XII Всероссийское совещание по проблемам управления. ВСПУ-2014. Москва, 16-19 июня 2014 г.: Труды [Электронный ресурс]. М.: Институт проблем управления им. В.А. Трапезникова РАН, 2014. С.5101-5113.
- http://www.anylogic.ru. Экс Джей Текнолоджис», www.xjtek.ru.
- www.ingit.ru. Официальный сайт «Фирма «ИНТИТ», «Деловая карта».
- http://fuzzytech.com//
Автор: А.В. Фараонов, ИММОД-2021
Источник: https://www.anylogic.ru/
Понравилась статья? Тогда поддержите нас, поделитесь с друзьями и заглядывайте по рекламным ссылкам!
