

Инженеры Корнельского университета недавно разработали абсолютно новый волоконно-оптический сенсор, объединяющий доступные светодиоды и красители. Данная комбинация создает своеобразную “кожу”, способную регистрировать такие факторы, как давление, изгибы и деформации. Создание тактильных ощущений у роботов не является новым явлением. Японские ученые под руководством Минору Асады представили голову android-ребенка реагирующую на прикосновения и боль. Инженеры Технического университета Мюнхена создали сенсорную систему для роботов, состоящую из монетообразных датчиков, способных обнаруживать контакт, ускорение, близость объекта и температурные изменения. Разработка Корнельского университета выделяется своей хорошей растяжимостью, возможностью 3D-печати и, как результат, существенно более низкой стоимостью по сравнению с предшественниками.
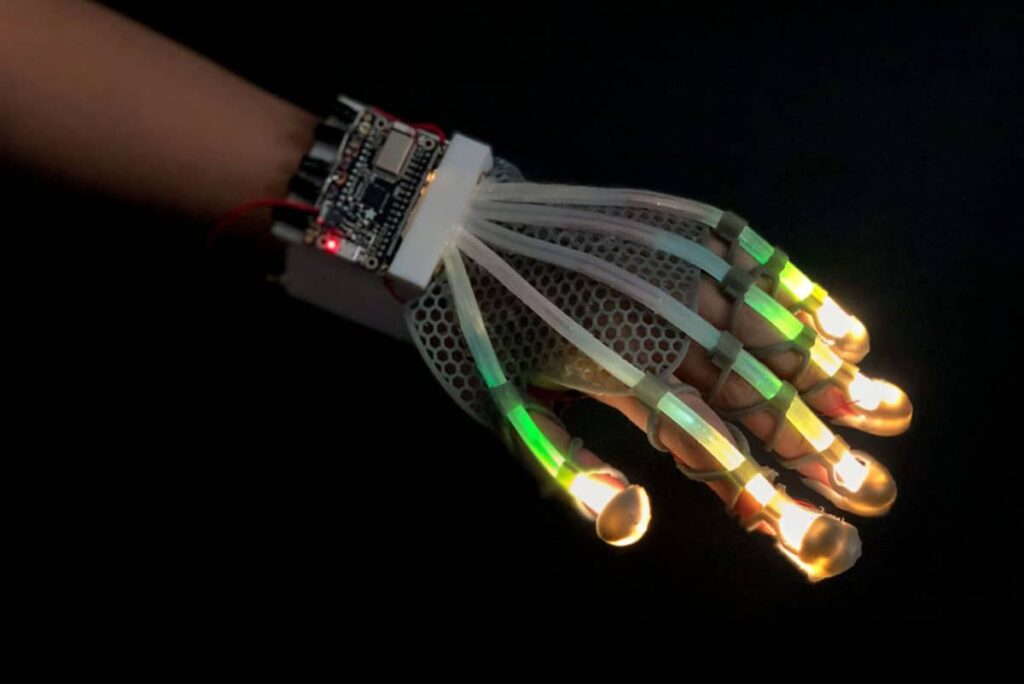
Новые сенсоры помогут роботам и системам VR ощутить человеческие прикосновения. Фото: Корнельский университет
Сенсоры SLIMS (Stretchable Lightguide for Multimodal Sensing – растягиваемый световод для мультимодального зондирования) были реально вдохновлены оптоволоконными датчиками на основе диоксида кремния, реагирующими на изменения влажности, температуры или формы.
В прототипе перчатки каждый палец имеет растягиваемый световод, содержащий пару полиуретановых эластомерных сердечников. Один сердечник прозрачен, а другой в нескольких местах заполнен абсорбирующим красителем и подключен к светодиоду. Каждое ядро соединено с красно-зелено-синим сенсорным чипом, чтобы фиксировать геометрические изменения в оптическом пути света. Когда вы деформируете световод, например, сгибая или сдавливая пальцы, красители подсвечиваются и точно регистрируют происходящее. Также они определяют конкретное местоположение деформации и её величину.

В новом растягивающемся датчике используется довольно простая и недорогая технология. Поскольку перчатка напечатана на 3D-принтере и оснащена Bluetooth, она может передавать данные в программу, которая в режиме реального времени воспроизводит движения и реагирует на деформацию. В перчатке также встроены светодиодные датчики и литий-ионный аккумулятор.
По словам исследователей, их разработка может быть использована для улучшения систем виртуальной реальности и встроена в руку робота, чтобы дать им осязание. Команда также рассматривает возможность использования этой технологии в физиотерапии и спортивной медицине. Материал, реагирующий на деформацию, позволит машинам «чувствовать» прикосновения и тем самым расширит их возможности.
В России тоже идут разработки в этом направлении. Так, три года назад ученые Тюменского госуниверситета представили разработку «Аватар S», позволяющую человеку – оператору робота на расстоянии не только видеть и слышать (с помощью виртуальной реальности) но и воспринимать осязательные ощущения.
Автор: Юрий Дорохов
Источник: https://habr.com/
