
![]() В этой статье публикуем первую часть материала, который был ранее предложен нашим читателям, но не потерял актальности. Развитие беспилотных технологий на железной дороге началось достаточно давно, уже в 1957 году, когда был создан первый успешный экспериментальный комплекс автоведения для пригородных поездов. Для понимания разницы между уровнями автоматизации для железнодорожного транспорта введена градация, определенная в стандарте МЭК – 62290 – 1. В отличие от автомобильного транспорта железнодорожный имеет 4 степени автоматизации, показанные на рисунке 1. Практически все поезда, эксплуатирующие на сети ОАО «РЖД» оснащены устройством безопасности, соответствующему уровню автоматизации 1. Поезда с уровнем автоматиазции 2 уже более 20 лет успешно эксплуатируются на сети российских железных дорог, оснащено несколько тысяч локомотивов.
В этой статье публикуем первую часть материала, который был ранее предложен нашим читателям, но не потерял актальности. Развитие беспилотных технологий на железной дороге началось достаточно давно, уже в 1957 году, когда был создан первый успешный экспериментальный комплекс автоведения для пригородных поездов. Для понимания разницы между уровнями автоматизации для железнодорожного транспорта введена градация, определенная в стандарте МЭК – 62290 – 1. В отличие от автомобильного транспорта железнодорожный имеет 4 степени автоматизации, показанные на рисунке 1. Практически все поезда, эксплуатирующие на сети ОАО «РЖД» оснащены устройством безопасности, соответствующему уровню автоматизации 1. Поезда с уровнем автоматиазции 2 уже более 20 лет успешно эксплуатируются на сети российских железных дорог, оснащено несколько тысяч локомотивов.

Рисунок 1. Степени автоматизации в соответствии с МЭК-62290
Данный уровень реализуется за счет алгоритмов управления тягой и торможения энергооптимального ведения поезда по заданному маршруту с учетом расписания и показаний систем автоматической локомотивной сигнализации, принимаемых по индуктивному каналу с рельсовых цепей. Применение 2 уровня понижает утомляемость машиниста и дает выигрыш по энергопотреблению и точности исполнения графика движения.
Уровень 3 предполагает возможное отсутствие машиниста в кабине, что требует внедрения системы технического зрения.
Уровень 4 предполагает полное отсутствие машиниста на борту, что требует существенного изменения конструкции локомотива (электропоезда). Например, на борту установлены автоматические выключатели, которые будет невозможно взвести снова при их срабатывании без присутствия человека на борту. В настоящий момент проекты по достижению уровней 3 и 4 реализуют ведущие компании мира, такие как Siemens, Alstom, Thales, SNCF, SBB и другие.

Компания Siemens представила свой проект в области беспилотных трамваев в сентябре 2018 года на выставке Innotrans . Данный трамвай эксплуатируется в Потсдаме с уровнем автоматизации GoA3 с 2018 года.

Рисунок 2 Трамвай компании Siemens
В 2019 году Siemens увеличил длину беспилотного маршрута более чем в 2 раза.
Компания ОАО “РЖД” одна из первых в мире начала разработку беспилотных железнодорожных транспортных средств. Так, на станции Лужской в 2015 году стартовал проект по автоматизации движения 3-х маневровых локомотивов, где АО «НИИАС» выступил интегратором проекта и разработчиком базовых технологий.
Создание беспилотного локомотива – комплексный сложный процесс, невозможный без кооперации с другими компаниями. Поэтому на станции Лужской совместно с АО «НИИАС» участвуют такие компании как:
- АО «ВНИКТИ» в части разработки бортовой системы управления;
- Siemens – в части автоматизации работы сортировочной горки (система MSR-32) и автоматизации выполнения операции надвига вагонов;
- АО «Радиоавионика» в части систем микропроцессорной централизации, управляющей стрелками, светофорами;
- ПКБ ЦТ – создание симулятора;
- ОАО «РЖД» в роли координатора проекта.
На первом этапе стояла задача достижения уровня 2 автоматизации движения, когда машинист при штатных условиях организации маневровой работы не использует органы управления локомотивом.
При эксплуатации обычных маневровых локомотивов управление движением осуществляется посредством передачи голосовых команд от диспетчера к машинисту с заданием соответствующих маршрутов (переводом стрелок, включением сигналов светофоров).
При переходе к уровню 2 автоматизации все голосовое общение было заменено на систему команд, передающихся по цифровому защищенному радиоканалу. Технически управление маневровыми локомотивами на станции Лужской было построено на базе:
- единой цифровой модели станции;
- протокола управления движением маневровых локомотивов (для отправки команд и контроля выполнения);
- взаимодействия с системой электрической централизацией для получения информации о заданных маршрутах, положении стрелок и сигналов;
- системы позиционирования маневровых локомотивов;
- надежной цифровой радиосвязи.
К 2017 году 3 маневровых локомотива ТЭМ-7А 95% времени работали на станции Лужской в полностью автоматическом режиме, выполняя следующие операции:
- Автоматическое движение по заданному маршруту;
- Автоматический подъезд к вагонам;
- Автоматическая сцепка с вагонами;
- Надвиг вагонов на сортировочную горку.
В 2017 году был запущен проект по созданию системы технического зрения для маневровых локомотивов и внедрения дистанционного управления в случае нештатных ситуаций.
В ноябре 2017 года специалисты АО «НИИАС» установили первый прототип системы технического зрения на маневровые локомотивы, состоящий из радаров, лидара и камер (рисунок 3).

Рисунок 3 Первые версии систем технического зрения
В ходе испытаний на станции Лужской системы технического зрения в 2017 – 2018 годах были сделаны следующие выводы:
- Применение радаров для обнаружения препятствий нецелесообразно, так как железная дорога имеет значительное количество металлических объектов с хорошей отражательной способностью. Дальность обнаружения людей на их фоне не превышает 60-70 метров, кроме того, у радаров недостаточная угловая разрешающая способность и составляет около 1°. Наши выводы были впоследствии подтверждены результатами испытаний коллег из SNCF (французский железнодорожный оператор).
- Лидары дают очень хорошие результаты с минимальным количеством шумов. В случае снегопада, дождя, тумана наблюдается не критическое уменьшение дальности обнаружения объектов. Однако, в 2017 году лидары стоили достаточно дорого, что значительно влияло на экономические показатели проекта.
- Камеры являются обязательном элементом системы технического зрения и необходимы для задач обнаружения, классификации объектов, а также дистанционного управления. Для работы в ночное время и сложных погодных условиях необходимо иметь инфракрасные камеры или камеры с расширенным диапазоном длин волн, способные работать в ближнем ИК диапазоне.
Основной задачей технического зрения является обнаружение препятствий и других объектов по ходу движения, а так как движение осуществляется по колее, то необходимо ее обнаруживать.
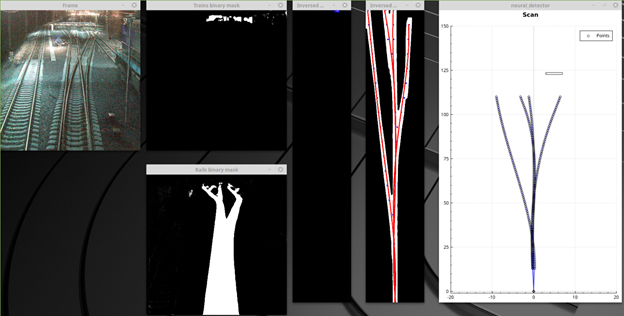
Рисунок 4. Пример многоклассовой сегментации (колея, вагоны) и определение оси пути по бинарной маске
На рисунке 4. приведен пример обнаружения колеи. Для того, чтобы однозначно определить маршрут движения по стрелкам, используется априорная информация о положении стрелки, показаниях светофоров, передаваемая по цифровому радиоканалу от системы электрической централизации. В настоящий момент на железных дорогах мира идет тенденция отказа от светофоров и переход на системы управления по цифровому радиоканалу. Особенно это касается высокоскоростного движения, так как на скоростях более 200 км/ч становится сложно заметить и распознать показание светофоров. В России существует два участка, эксплуатируемые без применения проходных светофоров – это Московское центральное кольцо и линия Альпика-Сервис – Адлер.
В зимний период могут возникнуть ситуации, когда колея находится полностью под снежным покровом и распознавание колеи становится практически невозможным, как показано на рисунке 5.
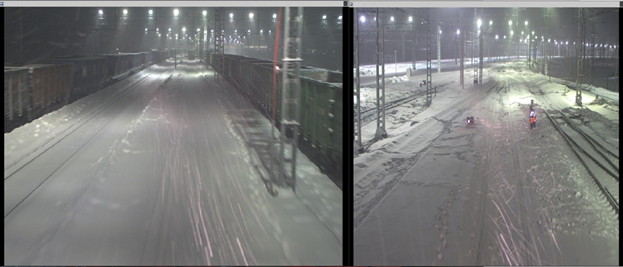
Рисунок 5 Пример колеи, покрытой снегом
В таком случае становится не понятным, мешают ли обнаруженные объекты движению локомотива, то есть находятся они на пути или нет. На станции Лужская в таком случае применяется высокоточная цифровая модель станции и высокоточная бортовая система навигации.
Причем цифровая модель станции создавалась на основе геодезических измерений базовых точек. Затем на основе обработки множества проездов локомотивов с высокоточной системой позиционирования достраивалась карта по всем путям.

Рисунок 6 Цифровая модель путевого развития станции Лужской
Одним из важнейших параметров для бортовой системы позиционирования является погрешность вычисления ориентации (азимута) локомотива. Ориентация локомотива необходима для правильной ориентации сенсоров и объектов ими обнаруженными. При погрешности угла ориентации в 1° погрешность координат объекта относительно оси пути на расстоянии 100 метров составит 1,7 метра.
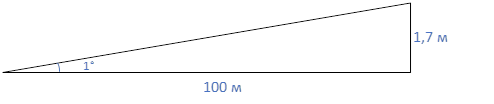
Рисунок 7 Влияние погрешности ориентации на поперечную ошибку координат
Поэтому максимально допустимая погрешность измерения ориентации локомотива по углу не должна превышать 0,1°. Сама бортовая система позиционирования состоит из двух двухчастотных навигационных приемников в режиме RTK, антенны которых разнесены на всю длину локомотива для создания длинной базы, без платформенной инерциальной навигационной системы и подключению к колесным датчикам (одометрам). Среднеквадратическое отклонение определения координат маневрового локомотива составляет не более 5 см.
Дополнительно на станции Лужской проводились исследования по использованию технологий SLAM (лидарных и визуальных) для получения дополнительных данных о местоположении.
В итоге определение железнодорожной колеи для маневровых локомотивов на станции Лужской осуществляется путем комплексирования результатов по распознаванию колеи и данных цифровой модели пути на основе позиционирования.
Обнаружение препятствий также осуществляется несколькими способами на основе:
- лидарных данных;
- данных стереозрения;
- работы нейронных сетей.
Одним из основных источником данных являются лидары, выдающие облако точек от лазерного сканирования. В алгоритмах, находящихся в эксплуатации, преимущественно используются классические алгоритмы кластеризации данных. В рамках исследований проверяется эффективность применения нейронных сетей для задачи кластеризации лидарных точек, а также для совместной обработки лидарных данных и данных с видеокамер. На рисунке 8 показан пример лидарных данных ( облако точек с разной рефлексивностью) с отображением манекена человека на фоне вагона на станции Лужской.
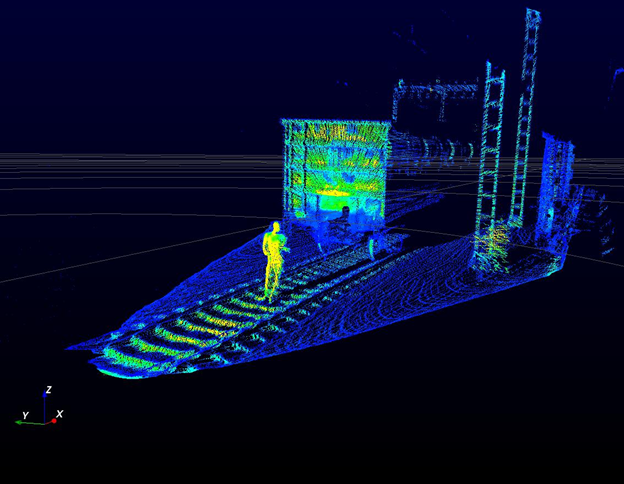
Рисунок 8. Пример данных с лидара на станции Лужской
На рисунке 9 приведен пример выделения кластера от вагона сложной формы по данным двух разных лидаров.
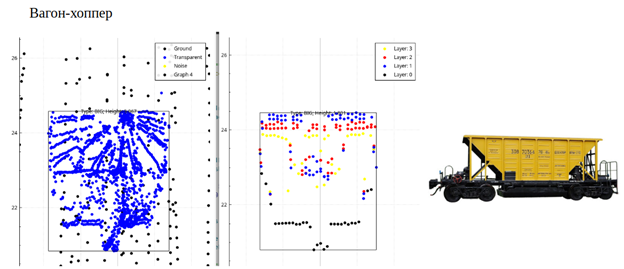
Рисунок 9. Пример интерпретации лидарных данных в виде кластера от вагона-хоппера
Отдельно стоит отметить, что за последнее время стоимость лидаров упала практически на порядок, а их технические характеристики выросли. Нет никаких сомнений, что данная тенденция сохранится. Дальность обнаружения объектов лидарами, применяемых на станции Лужской, составляет около 150 метров.
Также для обнаружения препятствий используется стереокамера, использующая другой физический принцип.

Рисунок 10. Карта диспаратности от стереопары и обнаруженные кластера
На рисунке 10 приведен пример данных стереокамеры с обнаружением столбов, путевых ящиков и вагона.
Для того, чтобы получить достаточную точность облака точек на достаточной для торможения дистанции, необходимо использовать камеры высокого разрешения. Увеличение размера изображения повышает вычислительные затраты на получение карты диспаратности. В связи с необходимыми условиями по занимаемым ресурсам и времени реакции системы, необходимо постоянно разрабатывать и тестировать алгоритмы и подходы для извлечения полезных данных из видеокамер.
Часть испытаний и проверки алгоритмов проводится с использованием железнодорожного симулятора, который разрабатывается ПКБ ЦТ совместно с АО «НИИАС». К примеру, на рисунке 11 показано применение симулятора для проверки работы алгоритмов стереокамеры.
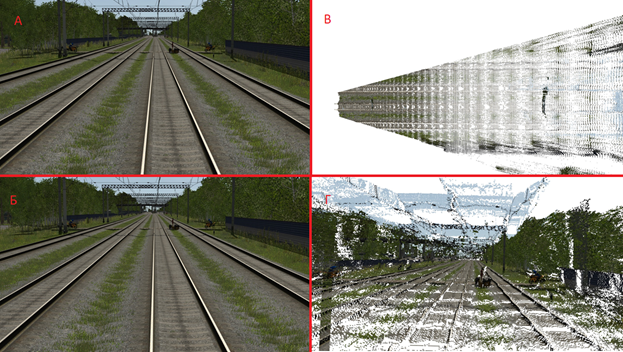
Рисунок 11. А, Б — левый и правый кадры с симулятора; В – вид сверху на реконструкцию данных от стереокамеры; Г — реконструкция изображений стереокамеры с симулятора.
Основная задача нейронных сетей – это детектирование людей, вагонов и их классификация. Для работы в тяжелых погодных условиях специалисты АО «НИИАС» также проводили испытания с применением инфракрасных камер.

Рисунок 12. Данные с ИК камеры
Данные от всех сенсоров комплексируются на основе алгоритмов ассоциации, где оценивается вероятность существования препятствий (объектов). Причем не все объекты на пути являются препятствиями, при выполнении маневровых операций локомотив должен производить автоматически сцепку с вагонами.
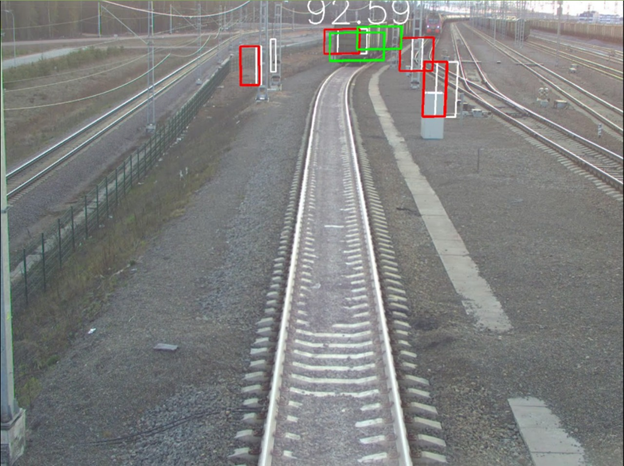
Рисунок 13. Пример визуализации подъезда к вагону с обнаружением препятствий разными сенсорами
При эксплуатации беспилотных маневровых локомотивов крайне важно оперативно понимать, что происходит с техникой, в каком она состоянии. Также возможны ситуации, когда перед локомотивом появится животное, например собака. Бортовые алгоритмы автоматически остановят локомотив, но что делать дальше, если собака не уйдет с пути?
Для контроля ситуации на борту и принятии решения в случае нештатных ситуаций разработан стационарный пульт дистанционного контроля и управления, предназначенный для работы со всеми беспилотными локомотивами на станции. На станции Лужская он размещен на посту ЭЦ.

Рисунок 14 Пульт дистанционного контроля и управления
На станции Лужской пульт, изображенный на рисунке 14, контролирует работу трех маневровых локомотивов. При необходимости с помощью данного пульта можно осуществлять управление одним из подключенных локомотивов посредством передачи информации в реальном времени (задержка не более 300 мс с учетом передачи данных по радиоканалу).
Вопросы функциональной безопасности
Важнейшим вопросом при внедрении беспилотных локомотивов является вопрос функциональной безопасности, определяемой стандартами МЭК 61508 «Функциональная безопасность систем электрических, электронных, программируемых электронных, связанных с безопасностью» (EN50126, EN50128, EN50129), ГОСТ 33435-2015 «Устройства управления, контроля и безопасности железнодорожного подвижного состава» .
В соответствии с требованиями к бортовым устройствам безопасности необходимо обеспечить уровень полноты безопасности 4 (SIL4).
Для соответствия уровню SIL-4 все существующие локомотивные устройства безопасности построены по мажоритарной логике, где вычисления параллельно выполняются в двух каналах(или более) со сравнением результатов для принятия решения.
Вычислительный блок обработки данных с сенсоров на беспилотных маневровых локомотивах также построен по двухканальной схеме со сравнением итогового результата.
Применение сенсоров технического зрения, работа при различных погодных условиях и в разной окружающей обстановки требует нового подхода к вопросу доказательства безопасности работы беспилотных транспортных средств.
В 2019 году вышел стандарт ISO/PAS 21448 «Дорожные транспортные средства. Безопасность заданных функций» (SOTIF). Одним из основных принципов данного стандарта является сценарный подход, где рассматривается поведение системы в различных обстоятельствах. Общее количество сценариев представляет собой бесконечность. Основной задачей при разработке является минимизация областей 2 и 3, представляющих известные небезопасные сценарии и неизвестные небезопасные сценарии.
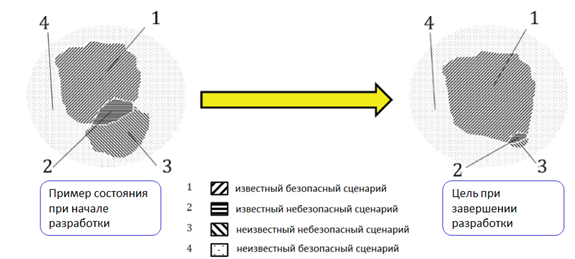
Рисунок 15. Преобразование сценариев в результате разработки
В рамках применения данного подхода специалисты АО «НИИАС» проанализировали все возникающие ситуации (сценарии) с момента начала эксплуатации в 2017 году. Часть ситуаций, которые сложно встретить при реальной эксплуатации, отрабатывается с применением симулятора ПКБ ЦТ.
Вопросы нормативного регулирования
Для того чтобы действительно полностью перейти на полностью автоматическое управление без присутствия машиниста в кабине локомотива необходимо также решить вопросы нормативного регулирования.
В настоящий момент ОАО «РЖД» утвержден план-график выполнения работ по нормативному обеспечению реализации мероприятий по внедрению систем управления железнодорожным подвижным составом в автоматическом режиме. Одним из важнейших вопросов является актуализация Положения о порядке служебного расследования и учета транспортных происшествий, повлекших причинение вреда жизни или здоровью граждан, не связанных с производством на железнодорожном транспорте. В соответствии с данным планом в 2021 году должен быть разработан и утвержден пакет документов, регламентирующий работу беспилотных железнодорожных транспортных средств.
Послесловие
В настоящий момент в мире нет аналогов беспилотных маневровых локомотивов, которые эксплуатируются на станции Лужской. Специалисты из Франции (компания SNCF), Германии, Голландии (компания Prorail), Бельгии (компания Lineas) в 2018-2019 годах знакомились с разработанной системой управления и заинтересованы во внедрении подобных систем. Одной из основных задач АО “НИИАС” является расширение функционала и тиражирование созданной системы управления как на российских железных дорогах, так и для иностранных компаний.
В настоящий момент ОАО «РЖД» также ведет проект по разработке беспилотных электропоездов «Ласточка». На рисунке 16 показана демонстрация прототипа системы автоматического управления электропоезда ЭС2Г «Ласточка» в августе 2019 года в рамках. Международного железнодорожного салона пространства 1520 «PRO//Движение.Экспо».

Рисунок 16. Демонстрация работы беспилотного электропоезда на МЦК
Создание беспилотного электропоезда является гораздо более сложной задачей из-за больших скоростей движения, значительного тормозного пути, обеспечения безопасной посадки/высадки пассажиров на остановочных пунктах. В настоящий момент активно ведутся испытания на МЦК. Рассказ о данном проекте планируется опубликовать в ближайшем будущем.
Автор: Попов Павел
Источник: https://habr.com/
