
 В предыдущих материалах мы рассмотрели возможности по обнаружению авианосных ударных групп (АУГ) космическими средствами разведки, стратосферными электрическими БПЛА, высотными и средневысотными БПЛА класса HALE и MALE. Непосредственно перед нанесением удара на АУГ может быть организована «загонная охота» с помощью стаи малогабаритных БПЛА на базе крылатых ракет и уничтожение самолётов ДРЛО на направлении атаки. Рассмотрим ещё одно перспективное направление − автономные необитаемые подводные аппараты (АНПА). Сразу оговорим несколько моментов. Зачастую в комментариях к статьям озвучивается что-то типа: «Зачем говорить о том, чего нет?», «У нас этого никогда не будет» и т.д. и т.п. У нас много чего нет.
В предыдущих материалах мы рассмотрели возможности по обнаружению авианосных ударных групп (АУГ) космическими средствами разведки, стратосферными электрическими БПЛА, высотными и средневысотными БПЛА класса HALE и MALE. Непосредственно перед нанесением удара на АУГ может быть организована «загонная охота» с помощью стаи малогабаритных БПЛА на базе крылатых ракет и уничтожение самолётов ДРЛО на направлении атаки. Рассмотрим ещё одно перспективное направление − автономные необитаемые подводные аппараты (АНПА). Сразу оговорим несколько моментов. Зачастую в комментариях к статьям озвучивается что-то типа: «Зачем говорить о том, чего нет?», «У нас этого никогда не будет» и т.д. и т.п. У нас много чего нет.
 Wave Glider
Wave Glider
Например, у нас фактически нет авианосцев (не считать же за таковой несчастного «Кузнецова»), но разговоры о его создании муссируются не одно десятилетие. У нас нет высотных БПЛА, но год назад не было и средневысотных, а в этом году они уже пошли в войска. Нет многоразовых ракет-носителей и производства спутников сотнями и тысячами в год, но пару лет назад такого не было ни у кого. И у нас нет никаких фундаментальных препятствий, чтобы освоить эти технологии (зато есть множество причин, чтобы не освоить).
В наше время стремительно развиваются гражданские и военные технологии, в результате чего появляются (ещё невозможные с десятилетие назад) системы и комплексы. Причём речь идёт не о мифической «антигравитации», а о вполне земных технологиях, типа лазерного оружия, которое хоть и начало создаваться достаточно давно, только сейчас дозрело до практического применения. Поэтому мы постараемся учитывать технические прогнозы сегодняшнего и завтрашнего дня. Ну а верить в них или нет − личное дело каждого.

Откуда на всё это взять деньги? На всё может и не получится, но денег в стране более чем достаточно. Вопрос надо ставить скорее об их целевом/нецелевом использовании.
Подводные глайдеры
Ранее мы рассмотрели высотные электрические БПЛА, потенциально способные месяцами или даже годами находиться в воздухе. Что-то концептуально схожее есть и для флота.
Речь идёт о так называемых подводных глайдерах, использующих эффект подводного планирования за счёт изменения плавучести и диффирента. Также их подводная часть может быть соединена кабелем с надводной, несущей солнечную батарею и антенны связи.
В качестве примера можно привести аппарат Wave Glider, имеющий двухсекционную структуру. Корпус с рулевой установкой, литий-ионными аккумуляторами и солнечными батареями связан с подводной частью-рамой кабелем длиной 8 метров. Крылья рамы совершают колебательные движения и придают Wave Glider скорость около двух километров в час.
Wave Glider обладает хорошей устойчивостью к штормовым условиям. Автономность аппарата составляет 1 год без проведения технического обслуживания. Платформа Wave Glider является открытой. И в неё может быть интегрировано различное оборудование. Стоимость одного аппарата Wave Glider составляет около 220 000 долларов.
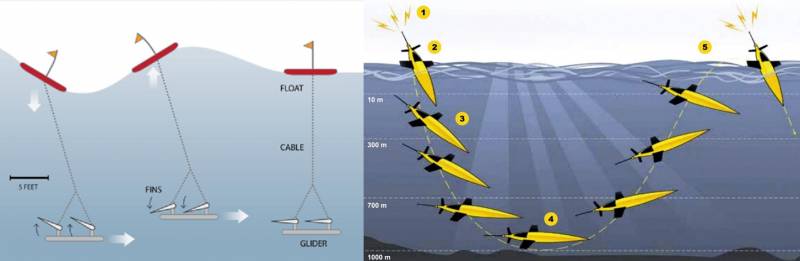 Схемы перемещения глайдеров разного типа
Схемы перемещения глайдеров разного типа
Wave Glider создан с использованием гражданских технологий. И используется в гражданских целях – для измерения сейсмической активности, магнитного поля, качества воды в районах глубоководного бурения, поиска утечек нефти, изучения солёности, температуры воды, океанских течений и многих других задач.
В военных целях аппараты Wave Glider испытывают для решения задач по поиску подводных лодок, защите портов, разведке и наблюдению, съёму метеоданных и ретрансляции связи.
В России разработку подводных глайдеров осуществляет АО «НПП ПТ «Океанос». Первый практический образец – глайдер МАКО, с рабочей глубиной погружения до 100 метров, был разработан и испытан в 2012 году.
 Опытный глайдер МАКО компании АО «НПП ПТ «Океанос»
Опытный глайдер МАКО компании АО «НПП ПТ «Океанос»
Эксперты предполагают возможность развёртывания в перспективе сотен и даже тысяч подводных глайдеров, действующих в рамках единой распределённой сетецентрической структуры. Автономность подводных глайдеров может достигать пяти лет.
К их преимуществам (помимо высокой автономности) относят малую стоимость создания и эксплуатации, низкий уровень собственных физических полей, простоту развёртывания.
Если взять за основу стоимость аппарата Wave Glider 220 тысяч долларов США, то в год может быть произведено 200 аппаратов на сумму 44 миллиона долларов. Через 5 лет их будет уже 1000 единиц. И в дальнейшем это количество может поддерживаться на постоянном уровне.
Много это или мало? Площадь вод мирового океана составляет 361 260 000 квадратных километров. Таким образом, при запуске 1000 подводных глайдеров на 1 глайдер будет приходиться по 361 260 квадратных километров (это квадрат со стороной 601 км).
 Одна тысяча подводных глайдеров, распределённая по поверхности вод Мирового океана.
Одна тысяча подводных глайдеров, распределённая по поверхности вод Мирового океана.
По факту, интересующая нас площадь водной поверхности будет значительно меньше, также уберём приграничные воды, поверхность, покрытую льдом. И в конечном итоге один подводный глайдер будет приходиться на квадрат со стороной порядка 100−200 километров.
Чем эти глайдеры могут заниматься? В первую очередь, решать задачи радиотехнической разведки (РТР) – осуществлять обнаружение излучения радиолокационных станций (РЛС) самолётов дальнего радиолокационного обнаружения (ДРЛО) и РЛС самолётов противолодочного обнаружения (ПЛО), радиообмена по каналам связи Link-16. Также может быть осуществлено обнаружение сигналов гидроакустических буёв, работающих в активном режиме, средств подводной акустической связи, работы гидроакустических станций (ГАС) в активном режиме.
В России разрабатываются неакустические методы обнаружения малошумных целей по кильватерному, тепловому и радиоактивному следам, а также по полям следности от движения винтов под водой. Возможно, что некоторые из них могут быть реализованы в составе оборудования подводных глайдеров.
Суммарная информация, полученная по спутниковым каналам передачи данных от всей сети подводных глайдеров, позволит с высокой вероятностью осуществлять обнаружение надводных кораблей, самолётов ДРЛО и ПЛО, подводных лодок противника.
Может ли одиночный корабль «проскочить» сотни подводных глайдеров? Скорее всего, да. Сможет ли это сделать АУГ? Маловероятно. И чем больше будет кораблей и самолётов в составе АУГ, тем с более высокой вероятностью можно будет вскрыть её местоположение.
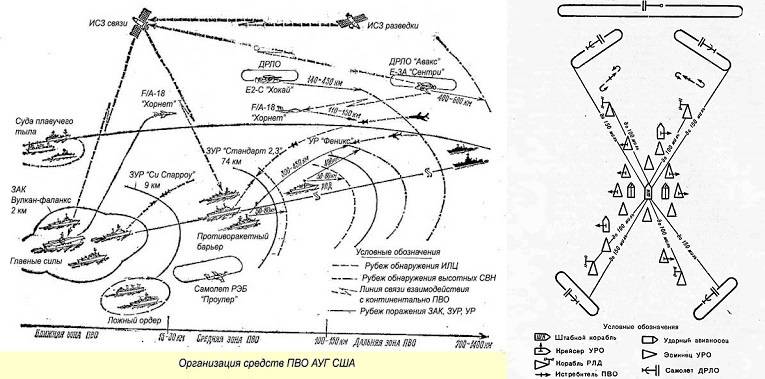 Корабли и самолёты АУГ оперируют на огромной территории, площадью десятки тысяч квадратных километров.
Корабли и самолёты АУГ оперируют на огромной территории, площадью десятки тысяч квадратных километров.
Может ли противник обнаружить подводные глайдеры? Может, но не все. И он никогда не будет уверен, что обнаружил их все. Сам глайдер обладает минимальной заметностью, а передача данных на спутник может осуществляться короткими пакетами.
Кроме того, как и в случае со стратосферными электрическими БПЛА, с высокой вероятностью появится множество не только военных, но и гражданских глайдеров. Обнаружение и уничтожение их всех потребует от противника значительной активности, которая демаскирует его перед другими средствами разведки.
Одной разведкой задачи глайдеров исчерпываться не будут. Они могут использоваться для подачи ложных сигналов в радиолокационном и акустическом диапазонах для умышленного привлечения внимания противника и отвлечения его ресурсов от поиска других угроз.
Нельзя исключать и возможность использования глайдеров в качестве своеобразных мобильных минных полей. Впрочем, это уже будут значительно более крупные, сложные и дорогие изделия.
Автономные необитаемые подводные аппараты
В принципе, рассмотренные в предыдущем разделе подводные глайдеры также относятся к лёгким АНПА, но в рамках данной статьи мы будем использовать эту аббревиатуру применительно к беспилотным подводным аппаратам большей размерности.
Центральное конструкторское бюро морской техники «Рубин» выполнило научно-исследовательские работы (НИР) по роботизированному подводному аппарату «Суррогат».
 Изображение АНПА «Суррогат».
Изображение АНПА «Суррогат».
Длина корпуса АНПА «Суррогат» составляет 17 метров, расчетное водоизмещение 40 тонн. Глубина погружения до 600 метров, максимальная скорость 24 узла, дальность плавания более 600 морских миль. Основная задача АНПА «Суррогат» – это имитация магнитоакустических характеристик различных подводных лодок.
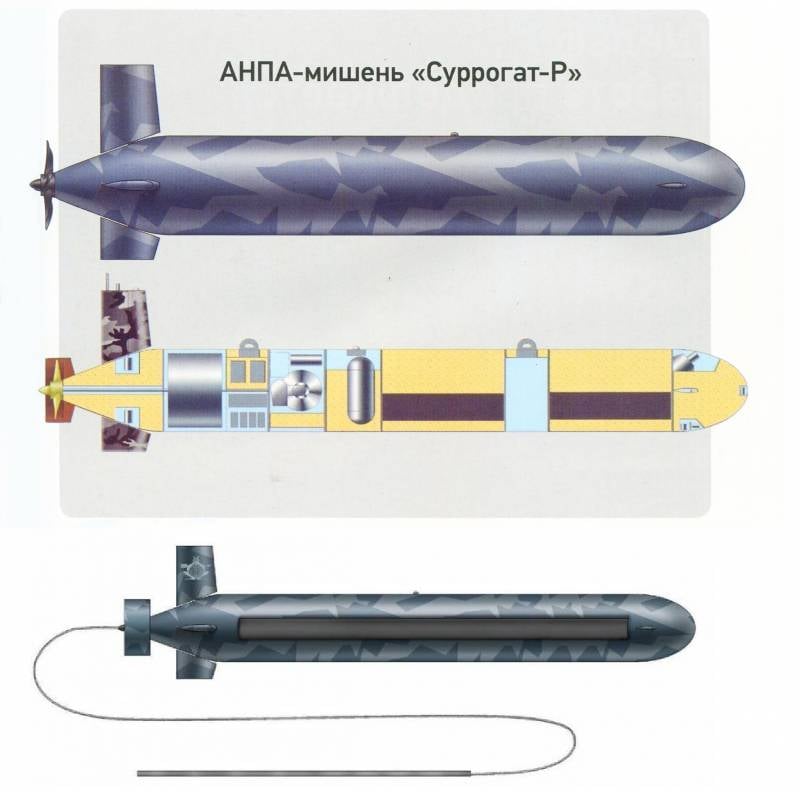 Схема АНПА «Суррогат».
Схема АНПА «Суррогат».
АНПА типа «Суррогат» могут использоваться для отвлечения противолодочных сил противника, прикрытия развёртывания ракетных подводных крейсеров стратегического назначения (РПКСН). Потенциально габариты позволяют размещать их на внешнем корпусе многоцелевых атомных подводных лодок (МЦАПЛ) и РПКСН.
 Подводная атомная ракетно-баллистическая лодка (ПЛАРБ) «Огайо» с закреплёнными на корпусе малогабаритными ПЛ для транспортировки диверсантов. Аналогично на корпусе МЦАПЛ/РПКСН могут быть закреплены несколько АНПА «Суррогат».
Подводная атомная ракетно-баллистическая лодка (ПЛАРБ) «Огайо» с закреплёнными на корпусе малогабаритными ПЛ для транспортировки диверсантов. Аналогично на корпусе МЦАПЛ/РПКСН могут быть закреплены несколько АНПА «Суррогат».
Применяя АНПА «Суррогат», МЦАПЛ и РПКСН могут как повысить свою живучесть, так и реализовывать новые тактические схемы по противодействию НК и ПЛ противника.
Аппараты типа АНПА «Суррогат» можно считать «первой ласточкой» среди вооружений такого типа. В дальнейшем их конструкция будет усложняться, а список решаемых задач расширяться – это и разведка, и ретрансляция связи, и использование АНПА в качестве вынесенной оружейной платформы, причём не только для торпедного оружия или противокорабельных ракет (ПКР), но и для таких специфичных для подплава вооружений, как зенитно-ракетные комплексы (ЗРК).
Размещение ЗРК на обитаемых и необитаемых подводных лодках может существенно изменить формат войны на море, во многом нивелировав возможности самолётов ПЛО и ДРЛО, прикрывающих АУГ.
В России имеется значительный задел по созданию АНПА. В качестве примера можно привести глубоководный АНПА СГП «Витязь-Д» разработки ЦКБ МТ «Рубин».
 АНПА СГП «Витязь-Д» разработки ЦКБ МТ «Рубин».
АНПА СГП «Витязь-Д» разработки ЦКБ МТ «Рубин».
АНПА СГП «Витязь-Д» предназначен для обзорно-поисковой и батиметрической съемки, отбора проб верхнего слоя грунта, гидролокационной съемки рельефа дна, измерения гидрофизических параметров морской среды. Аппарат имеет нулевую плавучесть, в конструкции использованы титановые сплавы и сферопластик повышенной прочности. Он приводится в движение четырьмя маршевыми и десятью подруливающими электродвигателями. Полезная нагрузка включает эхолоты, гидролокаторы, средства гидроакустической навигации и связи, видеокамеры и другое научно-исследовательское оборудование. Радиус действия − 150 км, автономность аппарата около суток.
Также разработаны АНПА серии «Клавесин», которые существуют в двух модификациях – «Клавесин-1Р», разработки Института проблем морских технологий дальневосточного отделения российской академии наук (ИМПТ ДВО РАН) и «Клавесин-2Р-ПМ», разработки ЦКБ МТ «Рубин» (скорее всего, изыскания велись этими организациями совместно).
 АНПА «Клавесин-1Р» (вверху) и «Клавесин-2Р-ПМ» (внизу).
АНПА «Клавесин-1Р» (вверху) и «Клавесин-2Р-ПМ» (внизу).
Масса АНПА «Клавесин-1Р» составляет 2,5 тонны при длине корпуса 5,8 м и диаметре 0,9 м. Глубина погружения до 6000 м, дальность хода до 300 км, скорость хода 2,9 узлов. Оборудование АНПА «Клавесин-1Р» включает гидролокаторы бокового обзора, электромагнитный искатель, магнитометр, цифровую видеосистему, акустический профилограф, датчики температуры и электропроводности. Движение осуществляется от аккумуляторных батарей.
На базе АНПА, а также плавающих, подводных и вмораживаемых гидроакустических буев, подключающихся через спутники Гонец-Д1М к командному центру, компанией «Океанприбор» планируется создание системы навигации и связи «Позиционер».
Система должна обеспечить навигацию АНПА и связать их с наземными, воздушными и морскими центрами управления в режиме реального времени с использованием связи в УКВ-диапазоне, с возможностью прямого управления АНПА.
Можно обратить внимание, что существующие и перспективные АНПА пока имеют достаточно ограниченную дальность хода. Возможно, этот вопрос может быть радикально решён за счёт широкого применения перспективных аккумуляторов, энергоустановок неатомных подводных лодок (НАПЛ) или даже создания компактных ядерных реакторов, аналогичных установленному на АНПА «Посейдон». Такой реактор, в случае обеспечения ему достаточного ресурса, может быть установлен не только в АНПА, но в малогабаритных атомных подводных лодках, выполненных на базе неатомных и дизель-электрических ПЛ.
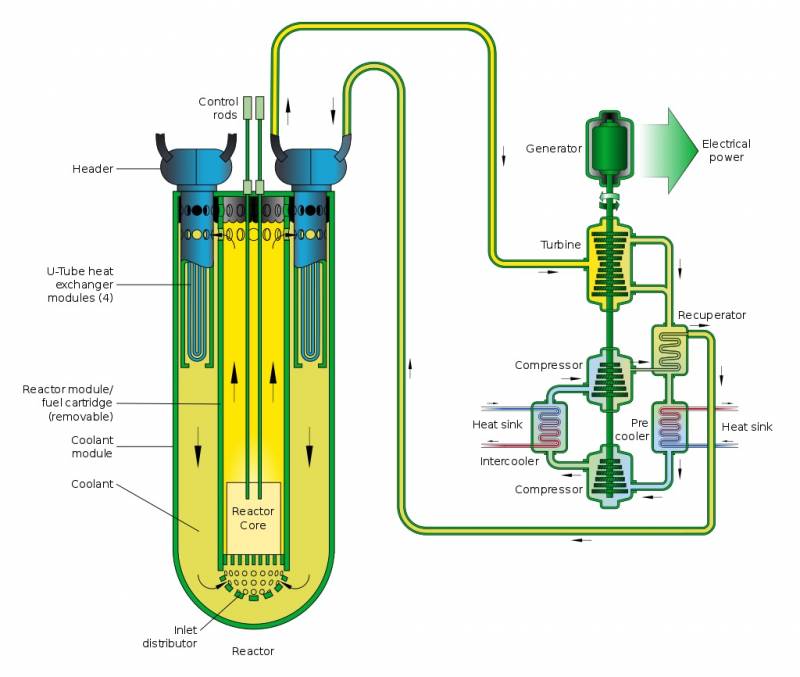 Схема реактора с жидкометаллическим теплоносителем, предположительно установленного на АНПА «Посейдон».
Схема реактора с жидкометаллическим теплоносителем, предположительно установленного на АНПА «Посейдон».
Представляет интерес и сам АНПА «Посейдон». Даже если не рассматривать возможность поражения кораблей АУГ непосредственно ядерной боевой частью АНПА «Посейдон», он может быть эффективно использован для вскрытия режима скрытности АУГ.
В рамках решения этой задачи на АНПА «Посейдон» вместо ядерной боевой части может быть установлено разведывательное оборудование и/или оборудование для имитации магнитоакустических характеристик различных подводных лодок. Масса АНПА «Посейдон» составляет порядка 100 тонн. Это позволит разместить на нём достаточно массивное оборудование, а ядерный реактор способен обеспечить его необходимой энергией.
 АНПА «Посейдон»
АНПА «Посейдон»
После первичного обнаружения АУГ средствами космической разведки по радиолокационным изображениям и/или кильватерному следу (пусть они и потеряют её в дальнейшем), средствами РТР высотных БПЛА по активности самолётов ДРЛО (пусть они даже впоследствии будут сбиты) и подводными глайдерами за счёт перехвата каналов связи Link-16 и неакустических признаков, в предполагаемую зону движения АУГ направляются несколько условных АНПА «Посейдон-Р». Они должны перемещаться на максимальной скорости, с максимально возможным резким и непредсказуемым изменением траектории движения и глубины погружения (до 1000 метров).
С одной стороны, это позволит ПЛО противника обнаружить АНПА «Посейдон-Р». С другой стороны, их поражение будет затруднено из-за высокой (до 110 узлов) скорости и сложной траектории движения. Периодически, через неравные промежутки времени, скорость АНПА «Посейдон-Р» должна снижаться на короткий промежуток времени для обеспечения эффективной работы ГАС.
Противник не может знать, что это – АНПА «Посейдон» с ядерной боевой частью или АНПА «Посейдон-Р», выполняющий функцию разведки. Следовательно, противник никак не сможет игнорировать эту ситуацию и будет вынужден бросить на уничтожение АНПА «Посейдон-Р» все имеющиеся силы, провести манёвр уклонения. Это приведёт к взлёту самолётов и вертолётов ПЛО, увеличению скорости движения надводных кораблей и подводных лодок, интенсивному радиообмену между ними, сбросу гидроакустических буёв, торпед и глубинных бомб.
Дальность хода АНПА «Посейдон-Р», составляющая свыше 10 000 километров, позволит им сутками «гонять» АУГ, что в итоге с высокой вероятностью приведёт к её обнаружению различными средствами разведки.
Выводы
В среднесрочной перспективе океан может быть насыщен большим числом лёгких АНПА – подводных глайдеров, способных непрерывно осуществлять мониторинг окружающей обстановки в течение нескольких лет, образуя распределённую разведывательную сеть, контролирующую огромную площадь водной поверхности и глубин. Это значительно усложнит задачу скрытного перемещения корабельных и авианосных ударных группировок, а в перспективе и одиночных кораблей и подводных лодок.
В свою очередь, «тяжёлые» АНПА могут применяться как ведомые компаньоны для надводных кораблей и подводных лодок, которые могут быть использованы для осуществления разведки, ретрансляции связи или использования в качестве вынесенной оружейной платформы. Они принимают на себя основные риски уничтожения их противником. В перспективе многие боевые задачи АНПА смогут решать и полностью автономно. В частности, осуществлять ведение разведки и ретрансляцию связи в составе распределённых сетецентрических систем разведки и связи.
Высокие технические характеристики АНПА «Посейдон» с ядерным двигателем позволяют рассматривать его не только как инструмент стратегического ядерного сдерживания, но и как основу для создания комплекса, который может применяться для вскрытия местоположения АУГ.
В совокупности АНПА различного типа составят ещё один разведывательный «слой», дополняющий возможности спутниковой разведки, стратосферных электрических БПЛА и высотных/средневысотных БПЛА класса HALE и MALE.
Автор: Андрей Митрофанов
Источник: https://topwar.ru/
