
Давид Фогт (David Vogt) — профессор робототехники в Фрайбергской горной академии (Freiberg University of Mining and Technology). У него есть сын, который очень любит играть в Lego, а также много деталей этого конструктора. Однажды ученому пришла в голову идея проверить возможность обучения робота собирать различные модели из деталей Lego. «Мы с сыном подумали, что будет неплохо создать робота, который мог делать то же, что и мы, когда играем», — говорит Фогт. Специалист с группой коллег приняли решение приобрести роботизированный промышленный манипулятор для своей лаборатории.
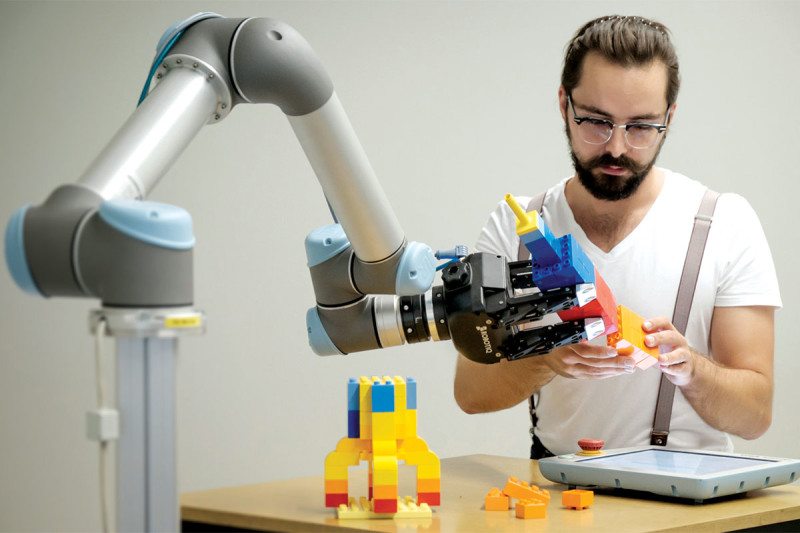
По прибытию в академию робота оснастили камерой Kinect. При помощи этой камеры робот мог наблюдать за людьми, которые, используя метки для отслеживания движений, собирали ракету из кирпичиков Lego. Люди собирали ракету одной и той же конструкции несколько раз, и робот постепенно получал все больше информации о процессе сборки этого объекта. Через некоторое время он смог взаимодействовать с партнером-человеком, помогая напарнику собирать модель. При этом робот не всегда находил необходимые детали там, где рассчитывал, но он уже умел искать их самостоятельно. Это, по словам специалистов, лишь один пример обучения роботов посредством демонстрации выполнения какого-либо процесса человеком.
Люди обучаются путем наблюдения за другими людьми без особых проблем. Например, дети только так и получают информацию об окружающем мире и действиях других людей. Но запрограммировать робота на выполнение новой задачи очень непросто. Мы чисто интуитивно понимаем, как выполнять то либо иное задание, а вот роботу интуиция недоступна — все действия необходимо жестко задавать при помощи программы.
Но сейчас специалисты по робототехнике пытаются освоить новый метод обучения роботов — метод, где компьютерные системы наблюдают за действиями человека, собирая данные наблюдения в базе данных. Некоторые ученые стараются контролировать действия роботов при помощи компьютера или телефона, в то время, как другие предоставляют своим подопечным полную свободу действий, давая им учиться на собственных ошибках. Причем роботов учат не только собирать объекты из Lego.Например, в прошлом году ученые из Мэрилендского университета начали обучать свою систему готовить, давая ей просматривать кулинарные видео с YouTube.
Корпорация Google недавно решила провести собственный эксперимент с самообучением роботов. Для этого были закуплены промышленные манипуляторы, которые подключили к единой базе данных. Каждое действие любого из роботов фиксировалось, а затем эти данные обрабатывались нейронной сетью. После анализа робот получал инструкцию с описанием оптимального алгоритма действий. Работа, которой пытались обучить системы — открывание двери с ручкой.
В одном из проведенных экспериментов роботу поручили изучать самые разные объекты. Это бутылки с водой, канцелярские принадлежности, книги. Система быстро освоилась с заданием и передала «коллегам» информацию о необходимой последовательности своих действий. После этого системе дали новое задание — передвинуть определенный объект в заданную точку. Никакие инструкции о характеристиках предмета робот не получал, а объекты постоянно менялись. Как оказалось, роботы неплохо могут выполнять такие задания, используя данные, накопленные в процессе изучения таких объектов. Машинам удалось просчитать последствия передвижения объекта по поверхности к нужной точке.
Что касается открывания дверей, то в одном из случаев роботам помогал человек. Другие машины получали нужные для обучения данные от робота, взаимодействующего с партнером-человеком, и в дальнейшем использовали эту информацию для повторений действий «коллеги». Как оказалось, системы с течением времени довольно эффективно обучались методом проб и ошибок. После того, как манипуляторы без проблем стали открывать двери с ручками разного типа, условия задачи было изменено. Например, изменялось положение двери, угол ее открытия и т.п. В финальном эксперименте оказалось, что роботы могут без помощи человека открыть дверь и замок, с которыми до сих пор не сталкивались.
«Выполняя определенные действия, мы часто действуем интуитивно, вероятно, мы можем передавать эту интуицию роботам, которые в результате обучаются и работают быстрее», — говорит один из разработчиков Google.
Одна из проблем для такого типа обучения роботов — перевод информации в форму, понятную для машины. У большинства роботов нет сенсоров, позволяющих им воспринимать окружающую среду и происходящие в ней явления подобно человеку. Поэтому такую информацию каждый раз нужно адаптировать для роботов и их управляющих систем. «Хороший учитель для робота понимает, что он имеет дело с машиной, у которой иной способ восприятия окружающей действительности», — говорит Ауде Биллард из Федеральной политехнической школы Лозанны (Швейцария).
Давида Фогта и его команда уверены, что человек может обучать роботов путем демонстрации своих действий. Возможно, такой способ обучения можно использовать на предприятиях. Таким образом, роботизированные системы можно обучить новым функциям без использования труда программистов. А так обычный рабочий сможет показать роботу, что нужно делать, и тот начнет выполнять новую для себя работу.
«В идеале, люди и роботы должны быть в состоянии выполнять такие действия, которые они не могут выполнять по отдельности», — сказал Фогт. Результаты работы будут вскоре представлены профессором и его коллегами на Международной конференции человекоподобных роботов в Канкуне, Мексика.

Понравилась статья? Тогда поддержите нас, поделитесь с друзьями и заглядывайте по рекламным ссылкам!
