
 Boston Dynamics была создана профессором Марком Райбертом в 1992 году. До этого Марк был известен как основатель и ведущий научный сотрудник Leg Lab («лаборатория ног» — в пер. с англ.) Массачусетского технологического института. Сотрудники лаборатории занимались исследованием и созданием динамических машин и механизмов, передвигающихся при помощи сгибающихся или вращающихся на шарнире опорных конструкций («ног»). 80-х годах прошлого столетия Марк и его команда разработали целый ряд «прыгунов», «ходунов» и «бегунов» и тем самым заложили фундаментальные основы проектирования шагоходов, а книга Райберта по теме балансирующих машин «Legged Robots That Balance» считается классической в среде профильных инженеров и ученых.
Boston Dynamics была создана профессором Марком Райбертом в 1992 году. До этого Марк был известен как основатель и ведущий научный сотрудник Leg Lab («лаборатория ног» — в пер. с англ.) Массачусетского технологического института. Сотрудники лаборатории занимались исследованием и созданием динамических машин и механизмов, передвигающихся при помощи сгибающихся или вращающихся на шарнире опорных конструкций («ног»). 80-х годах прошлого столетия Марк и его команда разработали целый ряд «прыгунов», «ходунов» и «бегунов» и тем самым заложили фундаментальные основы проектирования шагоходов, а книга Райберта по теме балансирующих машин «Legged Robots That Balance» считается классической в среде профильных инженеров и ученых.
Интерес к робототехнике возник у Марка в студенческие годы и в итоге он посвятил этой теме всю жизнь. В кандидатской диссертации под названием «Motor control and learning by the state space model» (1977 год) он рассматривал возможность использования роботов для моделирования поведения биологических организмов.

Сейчас господину Райберту уже 68 лет, тем не менее, он остается президентом компании и активно участвует во всех проектах. Несмотря на статус президента, Марк предпочитает гавайские рубашки пиджакам и галстукам и является веселым и общительным человеком.

Райберт описывает команду Boston Dynamics как «просто инженеров, которые строят роботов», но на самом деле достижения «бостонцев» трудно недооценить. Каждое их творение использует самые передовые технологии из разнообразных сфер: электрики, механики, компьютерных технологий, композитных материалов и так далее. Финансирование большинства проектов Boston Dynamics получает из военных источников, включая Агентство перспективных исследовательских проектов Минобороны США (Defense Advanced Research Projects Agency — DARPA), а также представителей сухопутных войск, флота и корпуса морской пехоты. Однажды Google, которая владела Boston Dynamics с 2013 по 2017 год, обмолвилась о выполнении обязательств по контракту с DARPA стоимостью 11 млн долларов США.
Примечательно, что сотрудничество с Google не сложилось с самого начала. Корпорация купила Boston Dynamics вместе с девятью другими роботехническими компаниями в 2013 году, но не знала, что с ними делать. «Со временем все мы ощутили стену непонимания между нами и ними — мы не были частью Google, мы были каким-то отдельным объектом», — рассказал один из сотрудников Boston Dynamics. Таким образом, в июне 2017 года японская телекоммуникационная медиакорпорация SoftBank Group, которая уже отметилась созданием робота Pepper, объявила о приобретении Boston Dynamics.
BigDog («большой пёс»)
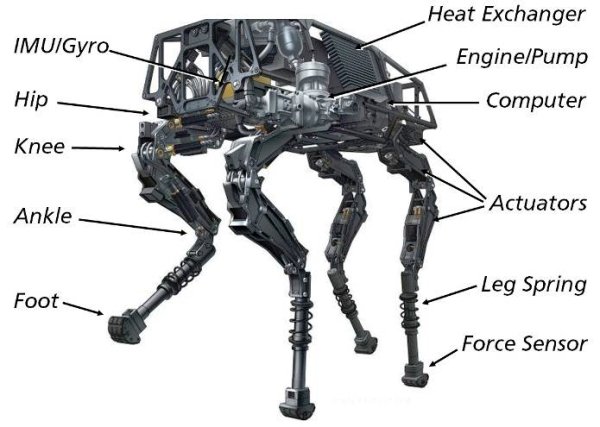
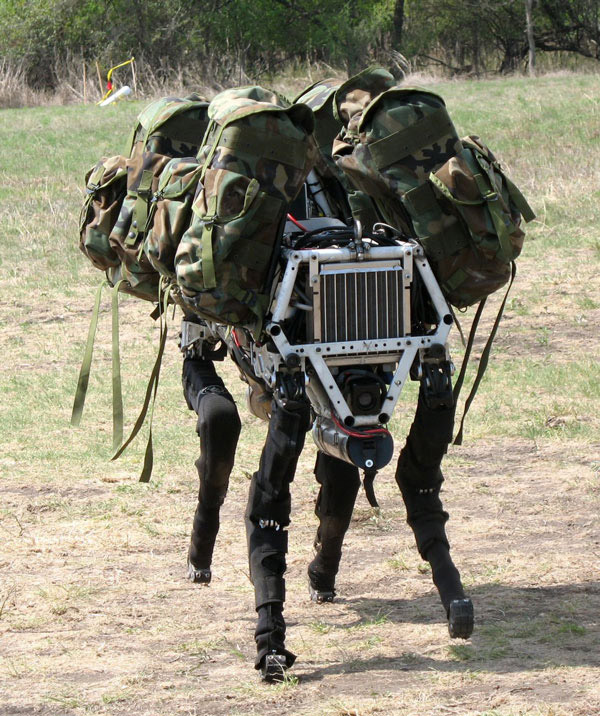
Самым первым роботом, получившим широкую известность, стал BigDog — четвероногий «мул» предназначенный для перевозки грузов. Министерству Обороны США нужен был транспорт, способный передвигаться по пересеченной местности и переносить тяжелое снаряжение. Первые модели BigDog были созданы в 2005 году и обладали следующими техническими характеристиками: высота 0,76 м, длина 0,91 м, вес 110 кг, переносимый груз до 155 кг, скорость перемещения 5–7 км/ч, возможность преодолевать уклоны до 35°, а также способность опускаться и вставать после падения.
«Большой пёс» представляет собой сложную автономную систему, работающую от двигателя внутреннего сгорания мощностью 15 л.с., и управляемую бортовым компьютером. Компьютер обрабатывает большое количество сенсоров, которые включают в себя датчики положения и усилия в шарнирах, контакт с землей, нагрузку на грунт, гироскоп, лидар, комплекс видеокамер для создания объемного изображения окружающего мира, датчики давления, температуры, расхода внутренних жидкостей и топлива.
В 2009 году военные выдвинули требования по модернизации робота. Проект получил название Legged Squad Support System, тем не менее, сами создатели окрестили свое детище AlphaDog. Грузоподъемность увеличилась до 185 кг, а автономность хода превысила 30 км. И, пожалуй, самым важным нововведением стала возможность робота принимать голосовые команды оператора.

AlphaDog прошел успешные испытания с морскими пехотинцами в 2015 году, тем не менее, на вооружение принят не был. Среди причин называли высокую стоимость, демаскирующий шум от двигателя и вероятные проблемы для отряда в случае поломки машины во время боевого задания.
Общая сумма затрат на разработку и внедрение BigDog и AlphaDog превысила 42 млн долларов. Финансирование в полном объёме осуществлялось за счет Министерства Обороны США.
Cheetah («гепард»)
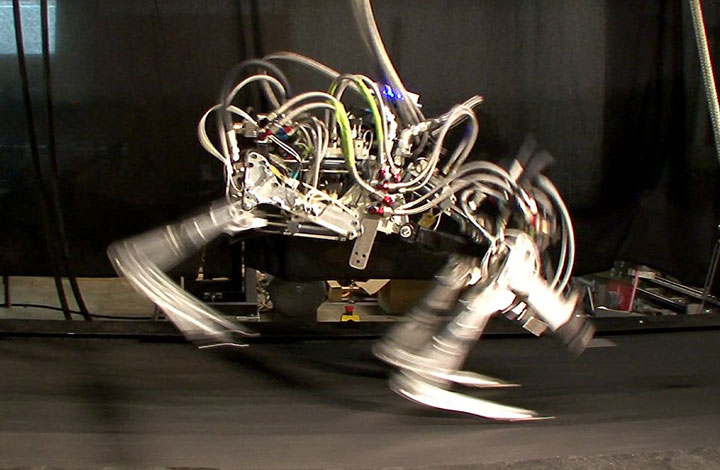
Следующую модель можно по праву считать самым быстрым шагающим роботом в мире. На испытательном стенде Cheetah разогнался до скорости 29 миль/час (более 46 км/час) — ни один человек в мире не способен бежать с такой скоростью. Лишь Усэйн Болт на коротких отрезках своих забегов достигал 44,7 км/час.
Конструкция спины робота повторяет строение таковой у живого гепарда — она способны сгибаться вперед и назад, увеличивая длину шага и скорость движения. Что характерно, деньги на создание Cheetah были выделены DARPA по программе Maximum Mobility and Manipulation. По сути, Cheetah является опытным образцом для отработки технологий создания быстрых шагоходов. Робот не способен передвигаться вне стенда.
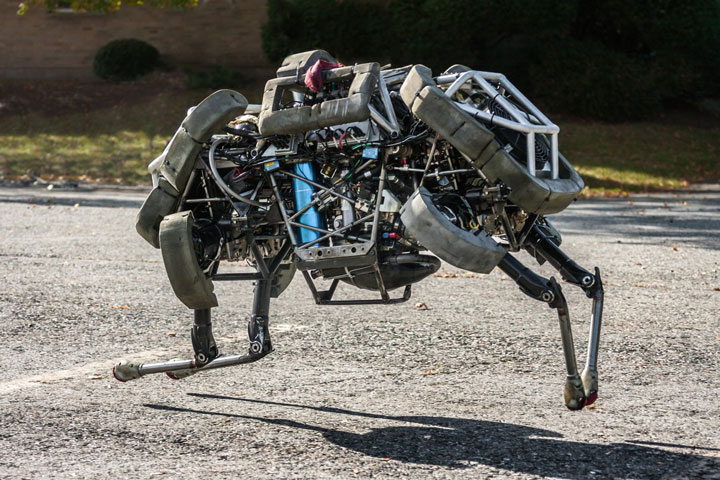
Развитием данной платформы стал другой робот под названием WildCat. Он тоже может похвастаться рекордами скорости — максимальное значение достигает 32 км/час, что позволяет ему занять первое место среди автономных четвероногих машин. Робот обладает немалыми размерами — его высота составляет 1,2 метра, а вес более 150 килограмм. «Сердцем» механизма является ДВС, который приводит в действие насос гидравлической системы.

С другой стороны «Дикий кот» способен свободно передвигаться в окружающем мире, а не только на беговой дорожке.
Как настоящий скакун, WildCat способен идти шагом, а также бежать рысью или галопом. «Дикий кот» умеет изгибать спину при беге, точно так же, как это делают животные.
Sand Flea («песчаная блоха»)

Sand Flea представляет собой компактную четырехколесную платформу. Вес машины составляет около 5,5 килограмм, а высота всего 15 см. Управление происходит по радиосигналу либо по внутренней программе.
Отличительной особенностью «Песчаной блохи» является возможность совершать прыжки на высоту до 30 футов (9–10 метров), и тем самым преодолевать большинство препятствий.

Запаса сжатого углекислого газа хватает примерно на 25 прыжков, а встроенная система стабилизации сохраняет ориентацию во время полета. Несколько видеокамер обеспечивают круговой обзор.
Финансирование проекта осуществляются армейской организацией Rapid Equipping Force (REF) и национальной лабораторией Министерства энергетики США Sandia National Laboratory. По задумке, Sand Flea и WildCat являются «разведчиками», в отличие от «грузчика» BigDog.
Spot («пятнышко» — собачья кличка в англоязычных странах)

Еще один четвероногий робот под названием Spot, как и его модификации SpotMini и New SpotMini, представляет собой вариацию «собачьей» серии. По сравнению с BigDog машины лишились двигателя внутреннего сгорания и обзавелись электродвигателем с гидроприводом и аккумулятором. Такое решение негативно сказалось на автономности и грузоподъёмности, но позволило значительно снизить уровень шума.
Spot умеет ориентироваться внутри и снаружи помещения, а также пользоваться лестницами и преодолевать невысокие препятствия. Высота машины составляет около 1 метра, вес 75 кг. Максимальная величина полезной нагрузки равна 45 кг, кроме того Spot способен переносить груз весом 23 кг в течение 45 мин на одном заряде батареи. Робот имеет хорошую устойчивость и способен устоять на ногах после тычков и пинков от своих создателей.

SpotMini — является уменьшенной версией модели Spot и, по мнению инженеров Boston Dynamics, предназначен для офиса или дома. Он весит 25 кг (30 кг с рукой — манипулятором).

SpotMini может работать около 90 минут от встроенного аккумулятора в зависимости от переносимой нагрузки, которая «по паспорту» составляет 14 кг. При этом SpotMini это самый тихий робот, созданный компанией.
Рука-манипулятор у SpotMini имеет пять степеней свободы и способна собирать и переносить различные предметы. Комплект датчиков, обеспечивающих корректную работу манипулятора, включает в себя стереокамеры, датчики глубины, IMU-сенсоры и датчики положения и усилия в конечностях.
Atlas («Атлант, Титан»)

Без сомнения, наибольший интерес для обычного человека представляет антропоморфный робот по имени Atlas. Специалисты Boston Dynamics заявляют, что «Атлант» является самой совершенной моделью в линейке современных человекоподобных роботов. Его рост составляет 1,5 метра, вес 75 кг, в его конструкции используется 28 шарниров-«суставов», что в два раза больше, нежели у «кошачьих» и «собачьих» серий. Робот способен переносить в руках вес около 10–11 кг.
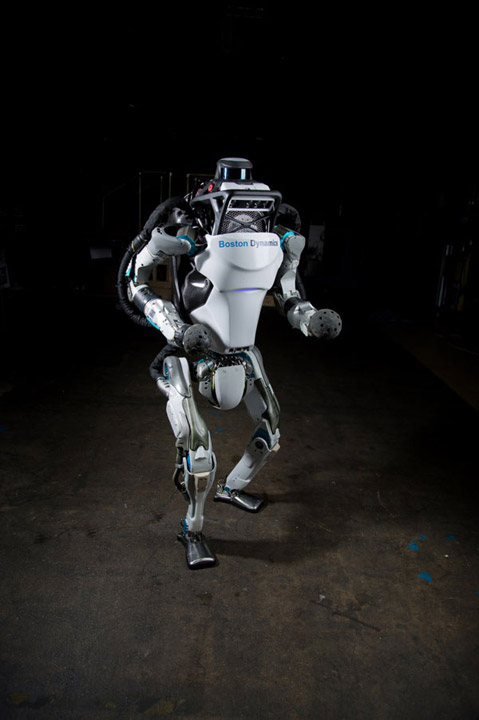
Система управления Atlas координирует движения рук, туловища и ног для обеспечения контроля над всем телом, что позволяет ему работать в большом радиусе действия, занимая лишь небольшую площадь. Стереозрение, дальномеры, гироскопы и другие сенсоры дают Atlas возможность манипулировать объектами в окружающей среде и путешествовать по пересеченной местности. «Атлант» сохраняет равновесие, когда несет груз или получает удар и может встать, если упадет.
В будущем разработчики рассматривают вариант добавить роботу коммуникационные способности. Atlas может научится говорить и различить людей по лицам и голосам. Что характерно, основатель Boston Dynamics Марк Райберт не является сторонником массового применения человекоподобных роботов. Он считает, что делать робота похожим на человека стоит только при целесообразности такого действия. Например, как в случае с моделью PETMAN, которая была разработана в Boston Dynamics для тестирования костюмов химической защиты и армейской спецодежды.
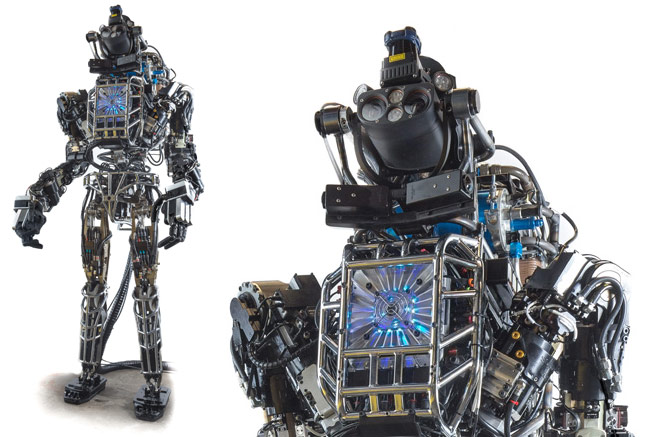
Первый прототип робота Atlas
PETMAN имитирует физиологию человека, контролирует температуру, влажность и потоотделение внутри одежды, чтобы обеспечить реалистичные условия испытаний. Робот оснащен встроенными датчиками, которые обнаруживают любые химические вещества, протекающие через костюм.
Разработки ведутся в рамках программы химической и биологической защиты (Chemical and Biological Defense Program — CBDP) департамента защиты Минобороны США (Department of Defense — DoD).
Handle («рукоять»)

Модель под названием Handle совмещает в себе преимущества наличия у робота «рук» и «ног» со скоростью передвижения и эффективностью колес. Он использует многие из тех же принципов динамики, баланса и манипуляций предметами, которые используются в четвероногих и двуногих роботах Boston Dynamics. В его конструкции применяется только 10 шарниров, что делает Handle менее сложным, чем остальные модели. Колеса позволяют быстро ездить на плоских поверхностях, в то время как ноги могут идти практически в любом месте.

Высота Handle составляет 2 метра, вес более 100 килограмм. Робот способен переносить груз до 45 килограмм и перепрыгивать высокие объекты.
Гидравлика приводится в действие электрическим двигателем, который питается от аккумулятора. Модель способна разворачиваться на месте, приседать и вставать.
RHex
RHex или «робот-таракан», как его прозвали разработчики, имеет компактные размеры и передвигается с помощью шести необычных ног. Высота модели составляет 14 сантиметров, вес 12 кг, а управление осуществляется по радиосигналу. RHex способен переносить до 2 кг полезного веса, в качестве которого можно установить дополнительное оборудование. Также робот оборудован встроенными видеокамерами в передней и задней части корпуса, что делает его хорошим разведчиком.

Герметичный корпус позволяет «таракану» передвигаться во влажной среде, болотистой и грязной местности, в канализационных трубах. Благодаря строению ног, модель с легкостью преодолевает горные породы, песок, растительность, железнодорожные пути, лестницы и другие препятствия.
Время автономной работы составляет четыре-пять часов. Робот был разработан по заказу DARPA и US Army Rapid Equipping Force (REF).
Понравилась статья? Тогда поддержите нас, поделитесь с друзьями и заглядывайте по рекламным ссылкам!