
 Идея сделать робота максимально похожим на человека появилась раньше, чем сами роботы, — в пьесе Карела Чапека R.U.R. (термин тоже придумал Чапек) роботы были полностью похожи на людей. Но нужны ли человекоподобные роботы на самом деле? Где используются андроиды и почему они так скупы на эмоции? Рассказываем в этой статье. Специализированные роботы при сборке автомобилей, переносе грузов и выполнении других программ справляются со своими задачами значительно лучше людей, но кроме выполнения своего узкого круга обязанностей такие роботы ни для чего иного не годятся. Если нам нужен максимально универсальный робот, он должен комфортно чувствовать себя в человеческой среде и инфраструктуре, а значит, ему необходимо быть похожим на человека — в конце концов, робот-пылесос не сможет достать чашку с полки, а робот-сварщик не расскажет, как пройти в библиотеку.
Идея сделать робота максимально похожим на человека появилась раньше, чем сами роботы, — в пьесе Карела Чапека R.U.R. (термин тоже придумал Чапек) роботы были полностью похожи на людей. Но нужны ли человекоподобные роботы на самом деле? Где используются андроиды и почему они так скупы на эмоции? Рассказываем в этой статье. Специализированные роботы при сборке автомобилей, переносе грузов и выполнении других программ справляются со своими задачами значительно лучше людей, но кроме выполнения своего узкого круга обязанностей такие роботы ни для чего иного не годятся. Если нам нужен максимально универсальный робот, он должен комфортно чувствовать себя в человеческой среде и инфраструктуре, а значит, ему необходимо быть похожим на человека — в конце концов, робот-пылесос не сможет достать чашку с полки, а робот-сварщик не расскажет, как пройти в библиотеку.

Яркие исторические робоперсонажи
В 1927 году, спустя семь лет после написания пьесы R.U.R., американская Westinghouse Electric Company представила Мистера Герберта Телевокса — робота, принимавшего через телефон сигналы, которые активировали заложенную в нём программу. По утверждению создателя, Телевокс мог включить плиту или проверить, работает ли свет в доме. В некотором роде, Телевокс был не просто роботом, а составляющей «умного» дома. Антропоморфность в Телевоксе была лишь беcполезной декорацией.

Один из Телевоксов со своим создателем Роем Уэнсли. Источник: Acme Telepictures/NEA
Появившийся спустя 10 лет в США робот Elektro был ростом с человека и мог выполнять 26 различных действий, в том числе ходить. Он управлялся при помощи голоса, но реагировал не на слова, а на их число — два отдельных услышанных слова включали движение, три значили остановку, четыре любых сказанных слова возвращали Elektro в начальное положение.

Отдельный мотор во рту помогал роботу надувать воздушные шары и… курить. Именно с тех пор человекоподобные роботы в основном сохраняют развлекательную направленность.

Робот Elektro и его робопёс Sparko. Источник: Daderot / Wikimedia
Лишь в 1970 году в Японии был представлен созданный Университетом Васэда первый человекоподобный робот, способный переносить грузы, — WABOT-1. Он умел общаться на японском языке, вычислял расстояния, выбирал направление движения и переносил в руках предметы.
WABOT-1 — первый человекоподобный робот, способный приносить пользу. Источник: Waseda University
Современные роботы и что с ними не так
Со дня появления Мистера Телевокса прошло 90 лет. Технологии за это время совершили колоссальный рывок, а человекоподобные роботы как были, так и остались развлекательным или информационным устройством с очень ограниченной сферой применения.
Одним из самых прославившихся в последние годы роботов стала Sophia от Hanson Robotics. Она умеет выражать до 60 эмоций, распознавать речь и генерировать ответы на основании собственного опыта и данных из интернета. София представляет собой лишь демонстрационную разработку, приносящую пользу как промо-проект, — по признанию экспертов, пока робот является обычным чат-ботом с весьма специфической мимикой, ничего по-настоящему полезного София не умеет.

Sophia — очень эмоциональный робот, но прозрачная крышка на затылке немного пугает. Источник: International Telecommunication Union
Другой робот-консультант, Айко Чихира (Aiko Chihira), созданный Toshiba, имеет более традиционную внешность и меньший, но более реалистичный набор мимики. Айко была представлена в 2014 году и сразу произвела фурор, а полгода спустя даже поработала пару дней консультантом в торговом центре в Токио. Чихира двигает глазами, головой и руками, в ней задействованы 43 двигательных механизма, робот распознает голос и отвечает репликами на хорошо поставленном японском или английском.
Робот Айко Чихира от Toshiba рассказывает о себе на выставке CEATEC 2014
В Toshiba Айко называют роботом для взаимодействия с людьми (communication robot). Разработчики рассчитывают использовать таких робоконсультантов в сфере услуг, а также в медицине для наблюдения за пациентами и общения с ними, однако все это случится в не самом ближайшем будущем. Айко не умеет ходить и сейчас может выполнять только функцию стационарного справочного бюро.

Айко Чихира на своём временном рабочем месте в торговом центре. Источник: Toshiba
Есть множество других человекоподобных роботов, менее известных, но не менее интересных: Actroid-SIT во время разговора смотрит в глаза и может прикасаться к собеседнику, а Harmony стала первым роботом для интима, способной поддержать разговор на пикантные темы. Но при текущем уровне развития технологий все они — дорогие стационарные собеседники и не больше. Учёные же мечтают о роботах-спасателях, разгребающих завалы, роботах-исследователях, работающих с инструментами в экстремальных условиях, роботах-помощниках, повторяющих ручной труд людей.
Универсальный антропоморфный робот — это очень сложная совокупность опорно-двигательного аппарата, механических конечностей, системы распознавания голоса, пространства и нейросетей, способных обрабатывать и понимать окружающую обстановку и голосовые команды. По отдельности в этих областях достигнуты определенные успехи.
Так, современные роботы могут поддержать разговор на уровне голосовых ассистентов типа Siri, однако пока разговор между машиной и человеком далек от диалога двух людей.
Прямохождение на двух ногах также совершило большой рывок за последние тридцать лет — стоит сравнить хотя бы неторопливые движения Honda E0 и пробежку Atlas. Правда, для обеспечения такой подвижности Atlas получил оборудования на 80 кг и рост около 180 см. Что же умеет этот, пожалуй, самый впечатляющий робот современности? Пока, только переносить пяти-килограммовые коробки. Кстати, присмотритесь к голове робота — там вращается лидар, сканирующий окружающее пространство и составляющий объемную карту мира вокруг. Это позволяет роботу максимально точно реагировать на препятствия, а именно обходить или перешагивать их.

Так SpotMini видит мир с помощью компактного лидара Velodyne VLP-16 Источник: кадр из видеоролика Boston Dynamics
Самой большой сложностью является мозг робота. Машины могут адекватно реагировать на людей и мебель, избегать опасности, разговаривать и более-менее понимать, чего от них хотят. Но уровень самостоятельности у современных человекоподобных роботов где-то на уровне двухлетнего ребенка — он сообразит взять кубик или открыть дверь, но на более сложные вещи, не предусмотренные чёткой программой, робот не способен. Пройдут многие годы, прежде чем робот сможет взять в руки обычный строительный инструмент и без какой-либо помощи со стороны построить простейший сарайчик.
Если объединить самые современные компоненты для создания антропоморфного робота, то в результате получится не очень ловкое, не очень сообразительное и не очень полезное создание с космической ценой. Например, каждый Honda Asimo — маленький робот, умеющий ходить по лестницам и пинать мяч, — обходится в миллион долларов, а в лизинг его можно взять за $150 тысяч в месяц. Вывод, к сожалению, очень прозаичный: современные человекоподобные роботы остаются специализированными машинами (а-ля робот-консультант). Создать по-настоящему универсального робота не позволяют технологии и финансовый аспект.
«Зловещая долина» роботов
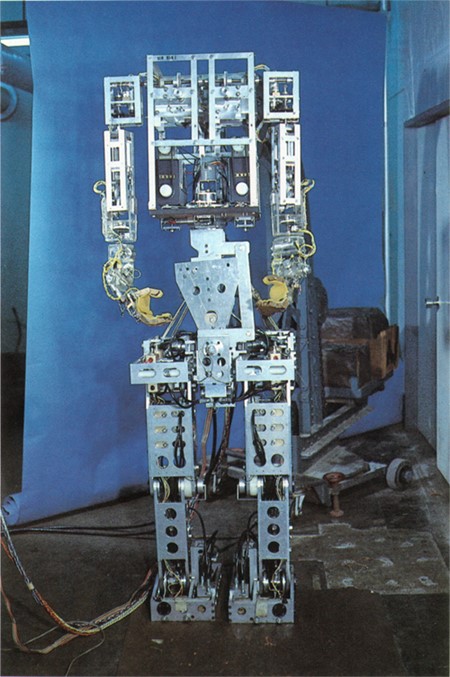
Элементы человеческой внешности, то есть кожа, глаза, волосы, не являются необходимыми для робота, они — не более чем украшение для повышения привлекательности механизма. Большинство антропоморфных роботов представляют собой голый «скелет» (см. случаи российского Фёдора, Atlas от Boston Dynamics, Honda Asimo). Каркасная конструкция без кожи упрощает доступ к компонентам, облегчает разработку благодаря отказу от лицевой мимики и избавляет робота от потенциальной проблемы «зловещей долины».
Этим термином обозначается эффект, при котором объекты, выглядящие и действующие как люди, вызывают у наблюдателей отвращение — так как недостаточно на них похожи. Название эффекта произошло от провала на графике, представленном в исследовании японского учёного Масахиро Мори. Тот в 1978 году провёл опрос, показавший, что в определённый момент похожесть робота на человека уже не привлекает, а отталкивает. Общепринятого объяснения этому психологическому механизму до сих пор не существует. Предполагается, что человек неосознанно замечает внешние отклонения других людей от некой привычной нормальности.
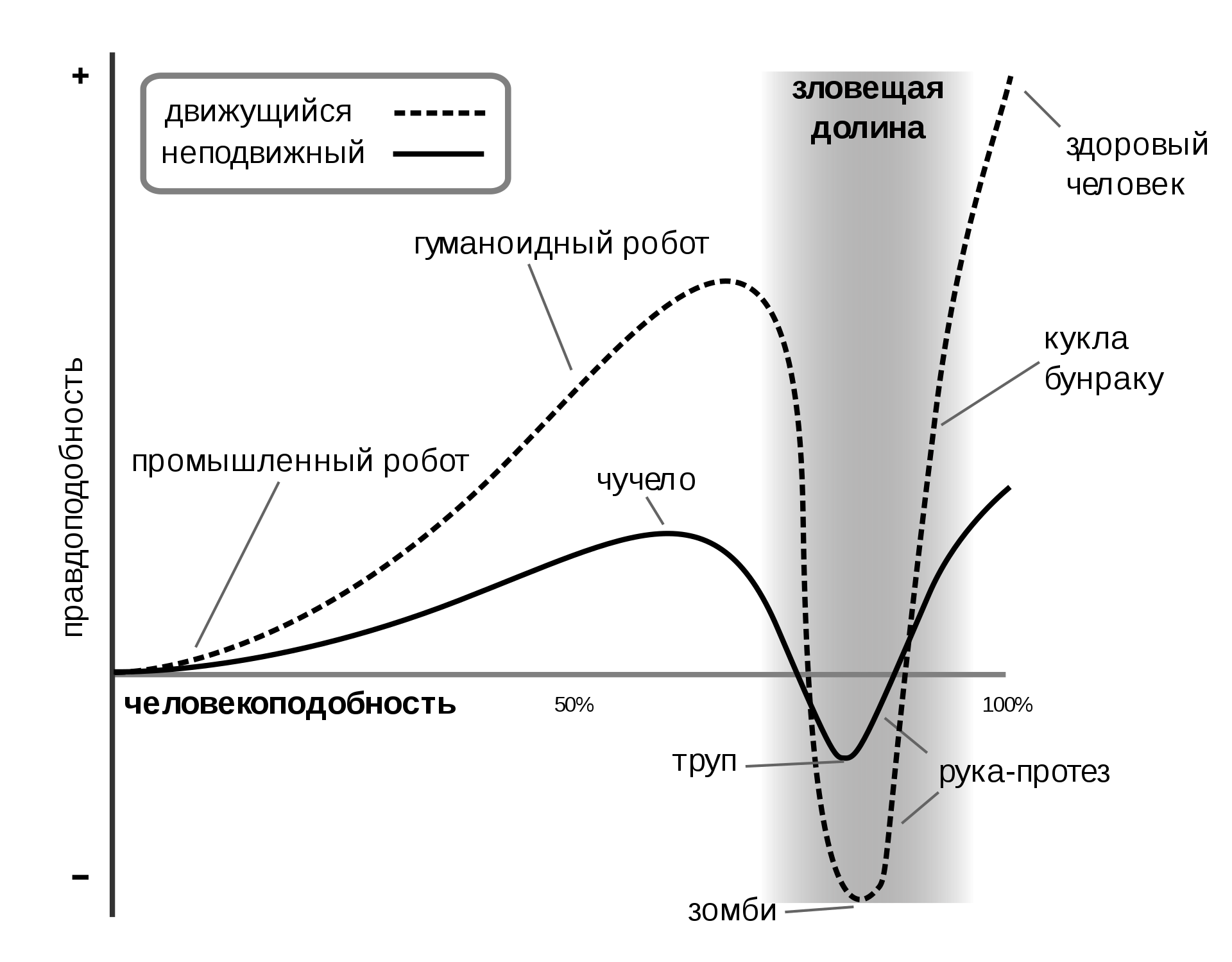
График из исследования Масахиро Мори, отражающий симпатию человека к рукотворным объектам в зависимости от их похожести на людей. Источник: Wikimedia
При определённом уровне реалистичности объекта человеческий мозг думает, что перед ним находится живой человек. Но затем мы видим неестественные движения рук, «мёртвую» мимику и нечеловеческий голос, из-за чего наступает когнитивный диссонанс, выраженный в испуге и неприязни. Робот создаёт иллюзию человека, а мы подсознательно перестаём понимать, что находится перед нами, и чувствуем в этом угрозу.
Антропоморфные роботы существуют уже давно, и сейчас они как никогда похожи на людей. Внешне. Функционально любой андроид проигрывает любому специализированному роботу и человеку — несмотря на немалую историю робототехники мечта об универсальном помощнике так и остается мечтой. Ну и напоследок, минутка юмора — свидание Уилла Смита с роботом Софией. С роботами «метод Хитча» работает так себе.
Лидары для робомобилей: обзор
Прогресс в области беспилотных автомобилей за последние годы стремительно ускорился. Уже с 1 декабря 2018 года беспилотники смогут беспрепятственно передвигаться по дорогам общего пользования в Москве и Татарстане. Кажется, еще немного и мы сможем сесть в машину и заниматься своими делами, пока наш транспорт возьмем на себя управление всем процессом вождения. Мечты мечтами, а на что в действительности способен такой автомобиль и вытеснит ли он человека?
На пути к полной автономности
Международное сообщество автомобильных инженеров (SAE International) разработало шестиуровневую классификацию автономности автомобилей. Эта система демонстрирует путь, который успели пройти автомобили за последние десятилетия, и описывает трудности, которые еще предстоит решить, чтобы создать по-настоящему беспилотное транспортное средство.
Уровень 0 — нет автономности. К этому уровню можно отнести все машины, никак не вмешивающиеся в процесс управления. Без человека такой автомобиль не тронется с места и не сможет избежать аварии. ABS или парктроник – вот и все, что можно ждать от авто нулевого уровня.
Уровень 1 — минимальная помощь. Включает машины, способные управлять рулением или ускорением/торможением при постоянном контроле со стороны водителя. Сюда же относятся системы помощи при парковке, когда рулем управляет авто, а водитель занимается педалями.
Уровень 2 — помощь с вниманием водителя. На втором уровне присутствует полная автоматизация несложных процессов, требующих одновременного автоматического управления рулением и движением. Сюда же входят современные продвинутые системы помощи водителю (ADAS).
Уровень 3 — ограниченный автопилот. Пограничный уровень, на котором уже можно говорить о полноценном автопилоте, действующем в рамках отдельных сценариев. В отличие от машин второго уровня, машины третьего не требуют постоянного внимания со стороны водителя — человек может заниматься своими делами, не хватаясь за руль каждые полминуты.
Уровень 4 — автопилот в городах. От абсолютного автопилота (5-й уровень) автомобили четвёртого уровня отличаются тем, что им нужны 3D-карты местности, с которыми автомобиль будет сверяться во время движения, сканируя местность. Если машина четвёртого уровня окажется в местности, отсутствующей на таких картах, автопилот перейдёт в режим третьего уровня или вовсе отключится.
Уровень 5 — полный автопилот. Тот самый сферический автопилот в вакууме, способный передвигаться в любую погоду и в любых точках планеты: будет ли это разбитая дорога без разметки, лесная просека, заснеженный горный перевал, загруженный мегаполис — автопилот пятого уровня пройдет везде, анализируя обстановку на ходу. Ему не требуются подготовленные 3D-карты — автономный автомобиль пятого уровня своими умениями соответствует живому водителю.
Как работают реальные автономные автомобили?
Камера + процессор обработки изображений
При разработке первых полноценных беспилотных авто основным способом восприятия пространства вокруг машины были камеры. Они позволяли быстро получать изображения в видимом диапазоне с широким углом обзора. Однако одной картинки с камеры для успешного функционирования автономного автомобиля недостаточно, беспилотнику нужен электронный аналог человеческого мозга, то есть специализированный процессор обработки изображений.
Созданием таких процессоров занимаются как крупные опытные компании, так и стартапы, скажем, Mobileye, ставший частью Intel, NVIDIA. Подобные разработки есть и у Toshiba. Семейство процессоров Toshiba Visconti обрабатывает картинку с четырёх камер, оценивая изображения сразу по множеству критериев: разметка, движущиеся и припаркованные авто, светофоры и знаки, встречный свет фар, пешеходы и велосипедисты. После определения и классификации объектов на видео, процессор передаёт информацию в «мозг» машины, чей автопилот уже и принимает решение об оптимальном поведении. Так работает расширенная система помощи водителю ADAS, предупреждающая столкновения и наезды на пешеходов (критерий автономности второго уровня).
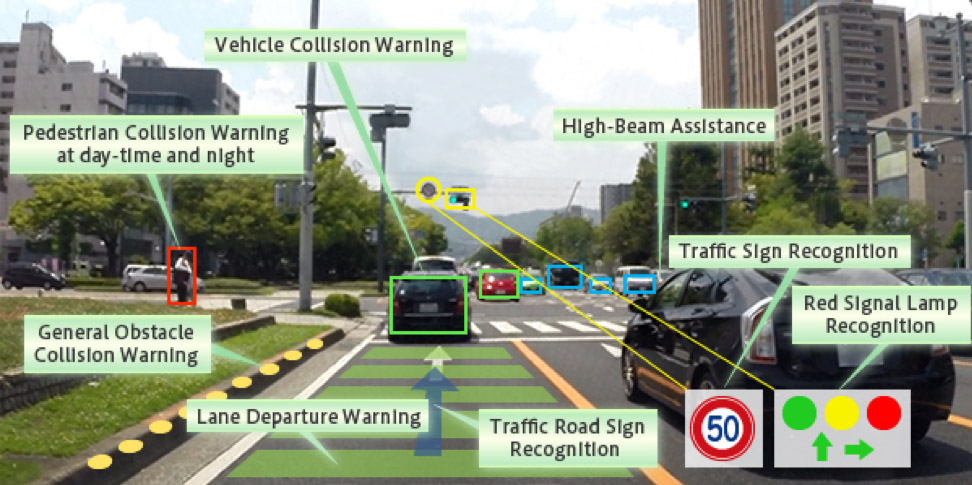
Связка из камеры и процессора Toshiba Visconti следит за дорожной ситуацией лучше и внимательней человека. Источник: Toshiba
Полный цикл работы Toshiba Visconti прошлых поколений от получения изображения до выдачи информации с результатами распознавания занимал до 100 мс. В Visconti 4 цикл удалось сократить до 50 мс. В лучшем случае время реакции водителя составляет 500 мс. За это время едущий на 80 км/ч автомобиль пройдет 11 метров — большое расстояние в случае опасной ситуации на дороге.
Visconti также решает проблему монокулярного зрения — процессор способен строить трёхмерную реконструкцию пространства, анализируя последовательность кадров при движении. Это работает как для движущихся, так и стационарных объектов на проезжей части и за её пределами.
Радар
Камеры не способны распознавать удалённые объекты и строить детализированные карты, к тому же их функциональность напрямую зависит от погодных условий. Компенсировать эти недостатки могут радары, излучающие радиосигналы с частотой в десятки гигагерц. Они идеально определяют препятствия в пространстве. Радары с частотой излучения в 24 ГГц и 77 ГГц уже применяются в дорогих системах ADAS для заблаговременного торможения при обнаружении пересечения курсов движения с пешеходом или другим авто. В отличие от камер, у радаров очень узкий угол действия, обратно пропорциональный желаемой дальности действия. К тому же радар имеет высокую себестоимость (на уровне 1000 долларов), что сразу ограничивает круг его использования исключительно представительскими и премиальными автомобилями.
Радары отлично справляются с локализацией объектов, но без определения их формы и лишь в узком диапазоне.
Лидар
Лидары считаются самым эффективным, но при этом самым неоднозначным сенсором для автономных автомобилей. Они строят подробнейшую картину мира вокруг себя с помощью лазерных лучей, которые отражаются от препятствий и возвращаются обратно. Причём лидары делают это с недосягаемой для других сенсоров точностью. С помощью лидара автомобиль создает собственную 3D-карту на десятки метров вокруг, распознавания машины, людей и любые препятствия.
Так видит мир автомобиль с лидаром
Однако недостатков у лидара пока больше, чем достоинств. Во-первых, лидары становятся беспомощны под сильным дождём или во время снегопада — лазерные лучи отражаются от капель воды и хлопьев снега. Во-вторых, лидар должен иметь полный круговой обзор, а значит, он создаёт «горб» на крыше авто. В-третьих, лидары не просто дорогие, а очень дорогие: ранние образцы производства Velodyne обходились в 75 тысяч долларов, современные разработки Waymo стоят 7500 долларов.
 Линейка лидаров Velodyne. Источник: Velodyne
Линейка лидаров Velodyne. Источник: Velodyne
Появление «твердотельных» лидаров без движущихся частей должно на порядки снизить стоимость устройств в ближайшие годы. Velodyne заявляет, что совершила некий прорыв, который уменьшит цену лидаров до 50 долларов.
Toshiba же в свою очередь работает над улучшением эффективности лидаров. Так, в этом году был представлен новый чип, объединяющий в себе цепи для анализа данных на дальних и ближних дистанциях. Это позволило удвоить эффективную дальность действия лидаров до 200 м, а также избавиться от проблемы засветов, влиявших на качество отражений.
Как это устроено у…
…Tesla
Для реализации автопилота в автомобили Tesla устанавливается система из восьми камер с разным углом и дальностью обзора, 12 ультразвуковых датчиков по кругу и дальнобойный фронтальный радар. Ультразвуковые датчики отвечают за распознавание машин в соседних рядах и препятствий при движении на небольших скоростях. Камеры отвечают за поиск пешеходов, автомобилей, разметки и знаков. Помогает им в этом радар. Для движения по маршруту используется GPS, а сенсоры следят, чтобы машина шла строго по полосам и избегала аварий. С одной стороны, это позволяет использовать автопилот Tesla в любых городах. С другой, для работы автопилот все равно требует внимания водителя.
В Tesla намеренно не используется лидар, Илон Маск открыто выступает против лидаров, обосновывая это их ценой и проблемной работой в плохую погоду. Трудно с ним не согласиться – дополнительные 7-10 тысяч долларов к цене и «горб» на крыше не прибавили бы Tesla привлекательности.
Как бы хорошо не смотрелась связка из камер, радара и ультразвуковых датчиков, и у них бывают сбои. В 2018 году Tesla Model S в режиме автопилота врезался в дорожный разделитель, что стало причиной гибели водителя. Как показало расследование со стороны владельцев электромобиля, автопилот Tesla не смог правильно считать стершуюся разметку, а камеры и радары, в свою очередь, не увидели опасности в стремительно надвигающемся стальном барьере.
…Waymo
В системах Waymo используется лидар, пять радаров, восемь камер и GPS, а в качестве серийных коммерческих носителей выбраны автомобили Chrysler Pacifica Hybrid (сейчас 600, планируется закупка 62 тысяч штук) и Jaguar I-PACE (в планах 20 тысяч штук).

Электромобиль Waymo Jaguar I-PACE не столь утилитарен, как просторный Chrysler Pacifica, но выглядит потрясающе — даже лидар на крыше не сильно портит вид. Копирайт: Waymo
При движении система Waymo использует данные Google Street View, сверяясь с ними с помощью своих сенсоров. Благодаря этому достигается полная автономность – в отличие от Tesla, машины Waymo действительно не требуют вмешательства водителя, а просто перевозят пассажиров. В отличие от Tesla, Waymo продают не автомобили, а услугу перевозки, то есть роботакси.
Панорамное видео Waymo помогает понять, как автономный автомобиль распознает окружающее пространство.
Главный недостаток Waymo — крайне ограниченный список городов, где работают беспилотники — для корректного функционирования автопилота городская среда должна быть отснята в 3D, а это долгая и сложная процедура, поэтому пока Waymo действует лишь в двух десятках американских городов. Впрочем, расширение дорожной сети — лишь вопрос времени. Большого времени.
…Яндекса
Яндекс представил свой проект беспилотного автомобиля всего год назад. На Toyota Prius устанавливался блок из лидара, камер, радаров, GPS и IMU, то есть типичных для автономных автомобилей компонентов. От Яндекса беспилотнику досталась программная платформа, которая хорошо себя показала как при движении по тесным московским улицам района Хамовники, так и при дальнем путешествии из Москвы в Казань.
Доехавший до Татарстана автомобиль Яндекса там и остался, став первым беспилотным такси в России. Сейчас он работает на территории города Иннополис, перевозя пассажиров между пятью главными точками. А в октябре аналогичное такси появилось на территории Сколково. В далеких планах компании вывести беспилотные такси на улицы городов на коммерческой основе.
…КАМАЗа
В 2016 году государственный институт НАМИ показал беспилотную «маршрутку» ШАТЛ, тогда еще бывшую не более, чем экспериментальным концепт-каром. Спустя два года КАМАЗ-1221 ШАТЛ был объявлен будущим серийным проектом, который встанет на конвейер в 2022 году. Мини-электробус с лидарами, камерами и ультразвуковыми датчиками пока осторожно передвигается на скорости 10 км/ч, но по мере совершенствования программной платформы скорость обещают подтянуть до 110 км/ч.
Что изменят беспилотники?
Исключение человеческого фактора позволит увеличить предельные условия эксплуатации автомобилей — увеличить максимальную скорость, уменьшить ширину полос, снизить дистанцию между автомобилями в потоке. Как следствие значительно возрастет пропускная способность дорог, вырастет средняя скорость и уменьшится количество заторов.
По оценкам американского Highway Capacity Manual, одна полоса шоссе за час пропускает порядка 2200 машин под управлением людьми. Различные исследования показывают, что переход на автономные автомобили позволит увеличить этот показатель до 7200-12000 машин в час. Такой впечатляющий скачок эффективности использования дорог достигается за счет увеличения безопасной скорости и уменьшения дистанции между авто на полосе с 40-50 метров до 6-7 метров — автомобилям, передающим друг-другу данные о своей скорости и предполагаемых маневрах, будет достаточно такого расстояния для безопасного движения.
Однако до такого беспилотного будущего нам пока далеко. Серийные автомобили известных автопроизводителей только-только адаптировали второй уровень автономности, самые лучшие и дорогие модели готовятся перешагнуть на третий уровень. Но в ближайшее десятилетие о беспилотниках пятого уровня автономности не стоит и мечтать — человек еще долгое время будет главным на дороге.
Источник: https://habr.com/
Понравилась статья? Тогда поддержите нас, поделитесь с друзьями и заглядывайте по рекламным ссылкам!